Workshop
Joint Workshop on Long-Term Visual Localization, Visual Odometry and Geometric and Learning-based SLAM
- Daniel Cremers
- video and slides
- Startup Artisense: cheap senseors (camera, IMU, GPS) to reconstruct the world
- Erwin Kruppa in 1913: 5 pts solution
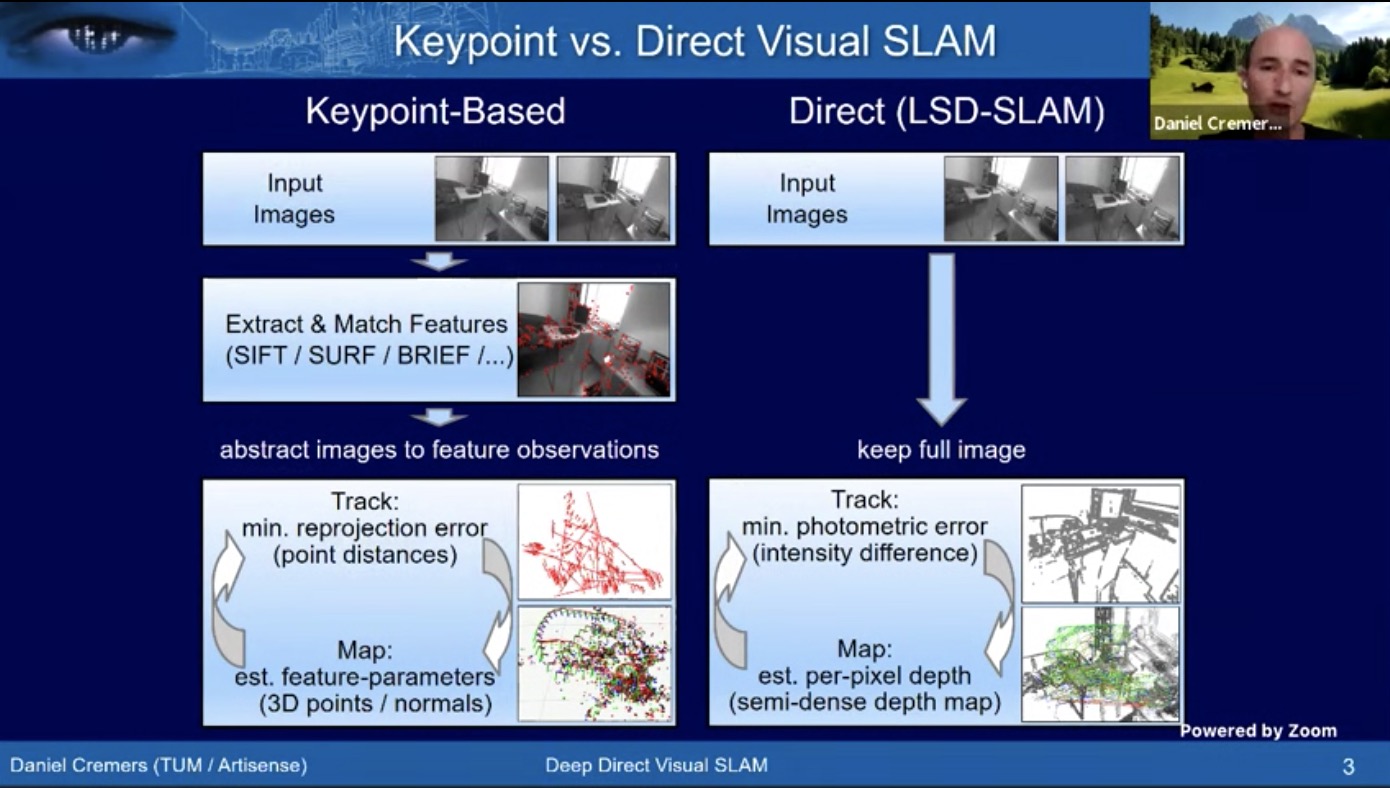
- Keypoint based methods vs direct method
- How to deploy DL approaches to boost direct SLAM
- How to deploy DL approaches to boost direct SLAM
- LSD SLAM: large scale direct SLAM
- Pose and 3D alternatingly
- How to do photometric adjustment simultaneously? –> DSO, as second gen of LSD
- DSO: Direct Sparse Odometry (1% drift): better than ORB-SLAM
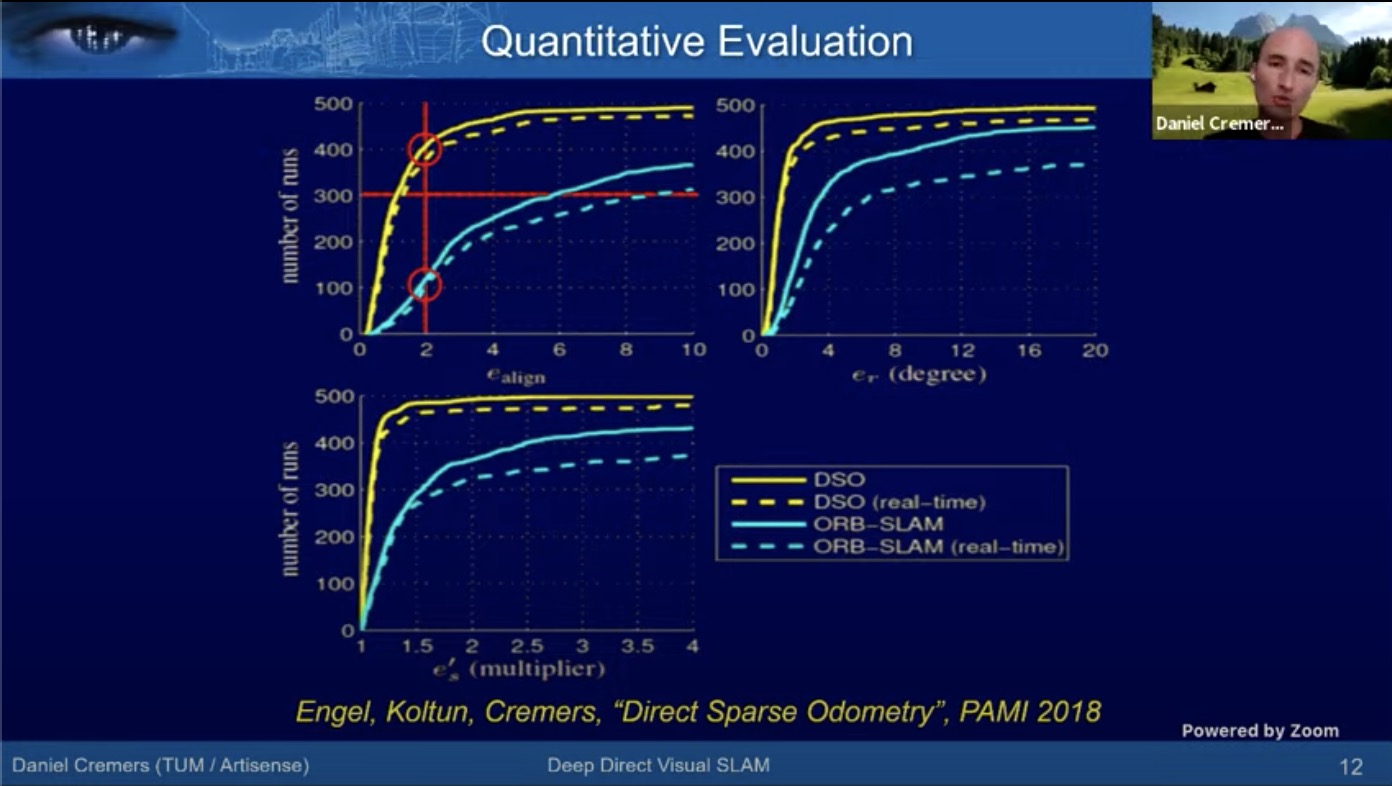
- DL is not SOTA in early works (2017 and 2018)
- DVSO (deep virtual stereo odometry) (ECCV 2018), mono DVSO on par with St. DSO. Very little scale drift.
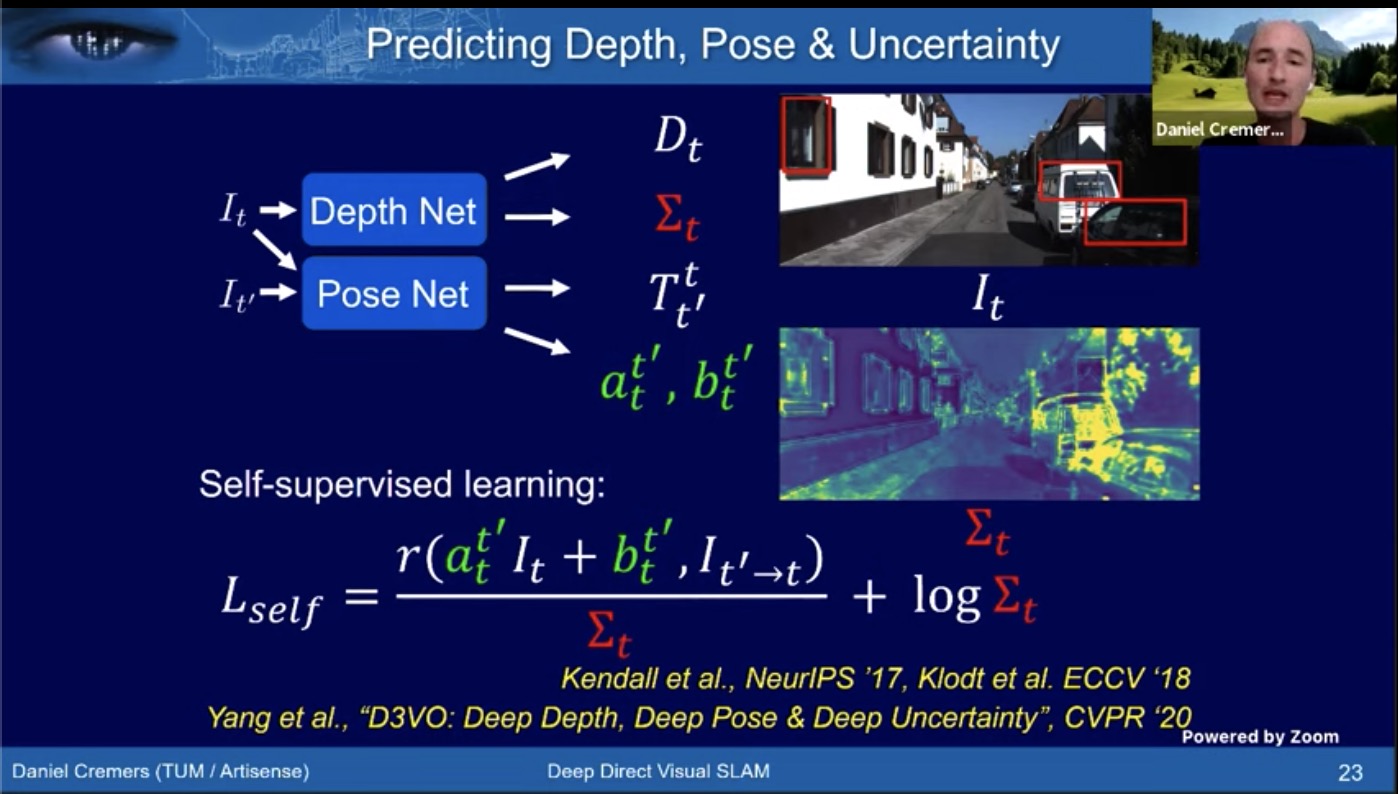
- D3VO
- on par with stereo VIO, much crisper than mono DSO
- Gasuss Newton Net for multi-weather localization ICRA 2020
- Genealizes quite well. Train on sunny/rainy, and test on sunny/overcast
- Q&A: How to compensate for photo consistency loss when the assumption breaks?
- predict affine transformation
- predict a mask where it fails and downweigh
- predict the changes with nueral network (sunny/rainy)
- He promotes hybrid approaches
- Deep learning predicts depth from single image
- Optimization is powerful and accurate when it is applicable
- It would be stupid not to use old knowledge
- From SLAM to spatial AI, Andrew Davison
- Startup SLAMCORE:
- robust localization
- dense mapping
- semantic undertanding
- Build semantic maps simultaneously
- Startup SLAMCORE:
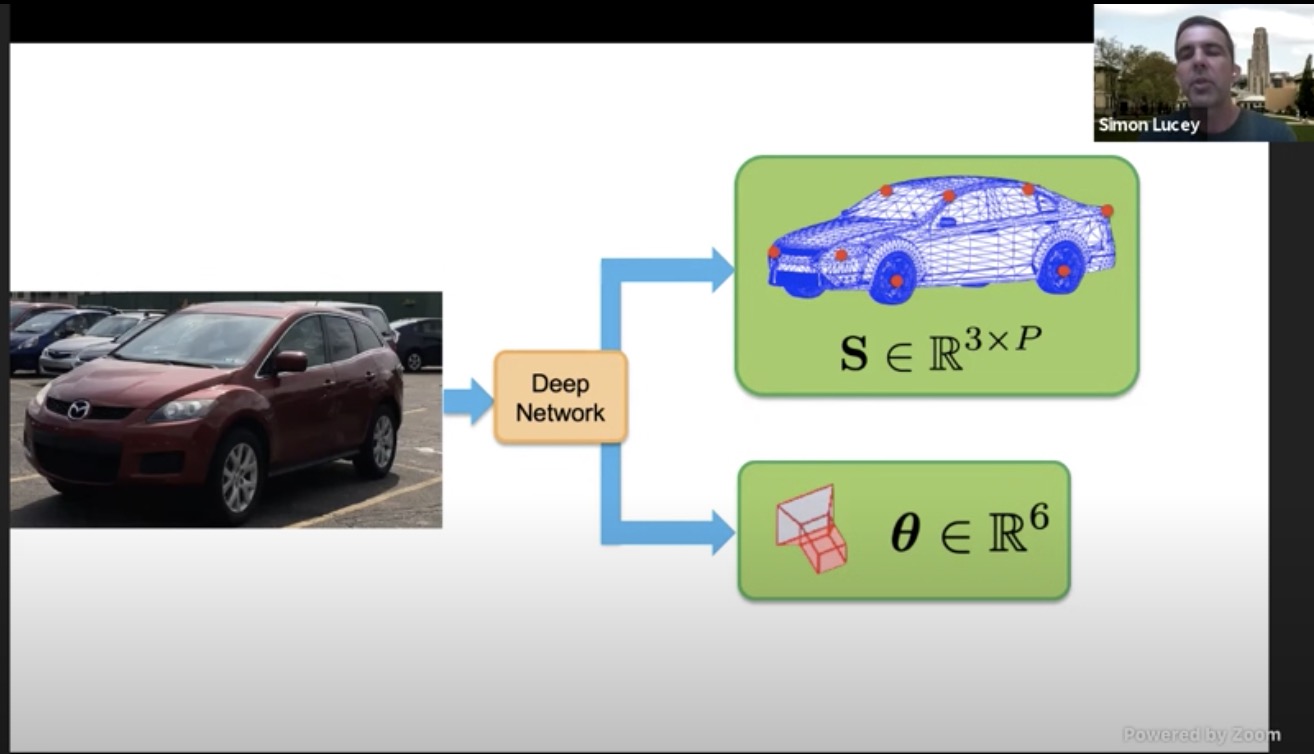
- Geometric reasoning in Machine vision using only 2D supervision
- Simon Lucey, Argo
- Mono image –> CNN –> 3xP + 6 DoF pose
- Pacal 3D
- But 3D groundtruth labeling is tedious and difficult (with 3D dictionary)
- Using simulation will lead to the sim2real gap.
- 3D supervision may not capture all the corner cases (limo, etc)
- Structure from category: lifting chair from 2d to 3d. Much like structure from motion.
- Just annotate 2D, and 3D structure can be learned inherently.
- Visual slam with deep learning
- Tomasz Malisiewicz
- SuperPoint
- powerful fully conv design
- No patches, simultaneous location and descriptor output
- real time with GPU
- No deconv layers, but rather classification (64+1 dustbin)
- 15-30 deg rotation during training
- Deep ChArUco: detects Charuco patterns in the dark
- SuperPoint VO: self improving VO
- SuperGlue: get better than motion-guided matching without any motion model.
- requires both sets of local features; a paradigm shift in matching
- works better with superpoint and naive matching, in wide baseline matching
- Quo vadis visual SLAM?
- multi-user SLAM
- integrating object recognition into the front end
- SLAM with plane and objects
- Sichao Yang, @Facebook, CMU
- point-based methods
- Works well in normal condition (Orb-slam, DSO)
- too sparse to detect car in driving
- challenging for low-texture place
- Background
- optimization method: decoupled (regress pose, then detect) and tightly coupled
- object representation: no shape prior (cuboid, sphere, ellipsoid), weak prior (skeleton) and accurate prior (3D cad)
- if not 100% sure if the object matches the 3D CAD, it is hard to use silouette loss. We could use shape encoder to adjust the 3D instances.
- optimization cost
- Single view detection, and multiview for optimization
- CubeSLAM: Monocular 3D Object SLAM
- Tracking with keypoint within object (maybe w/ optical flow). Much better than bbox based approach.
- Fixed object size assumption.
- For indoor environment looks fabulous. Do not need explicit loop closure to get good performance.
- Dense map just reproject the image onto the plane. –> Can we do the same for moving cars?
- Dynamic object SLAM
- Tracking without vision
- Jakob Engel
- TLIO: tight learned inertial odo
- Why useful? low power, privacy
- IMU measures the rotaitonal velocity and linear acc. Integrating rotational velocity and double-integrating linear acc.
- conventional VIO
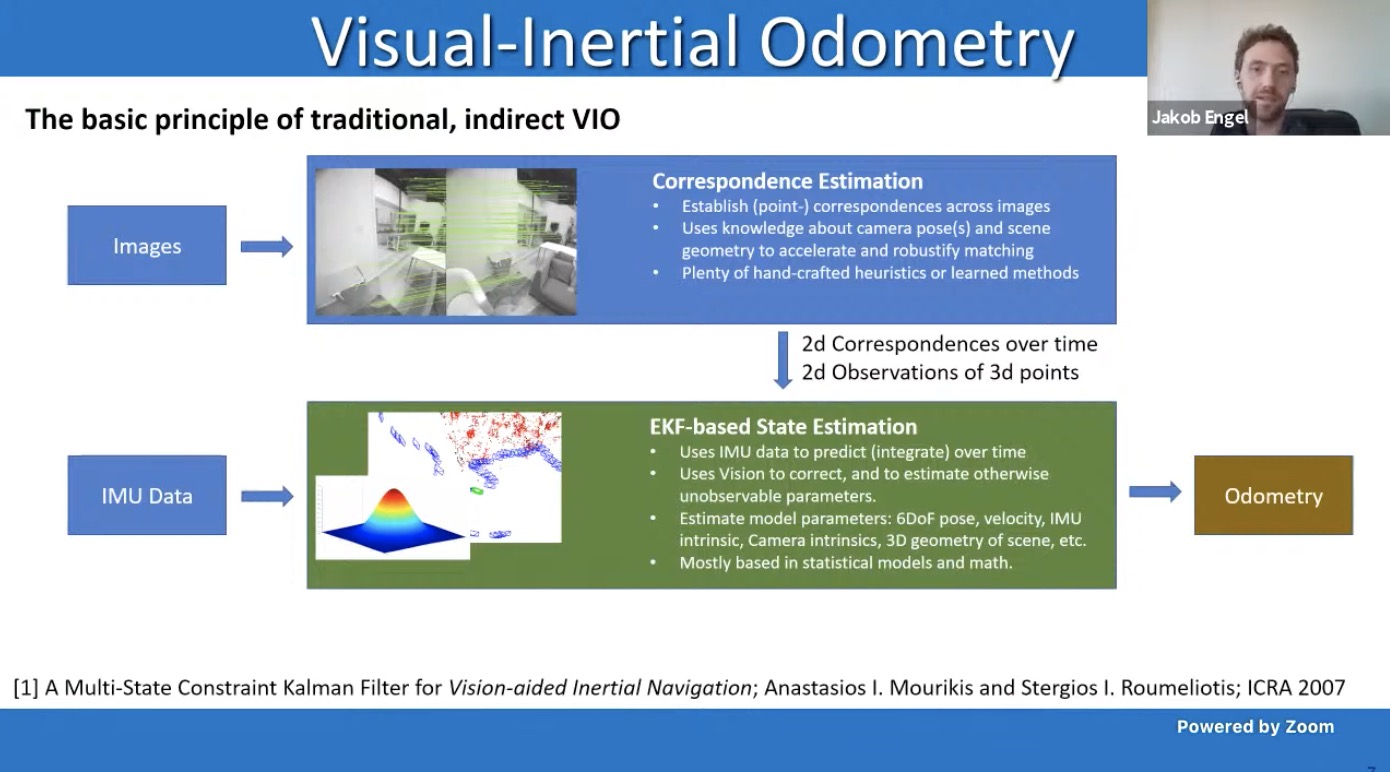
- long term drift of IMU is huge. Can we replace vision with another source of information?
- attach to the foot or wrist and
- ML to learn how people move
- RIDI (robust IMU double integration)
- TLIO motion model learning: use network to odometry (only displacement vector) in 1s from IMU input, used together with EKF
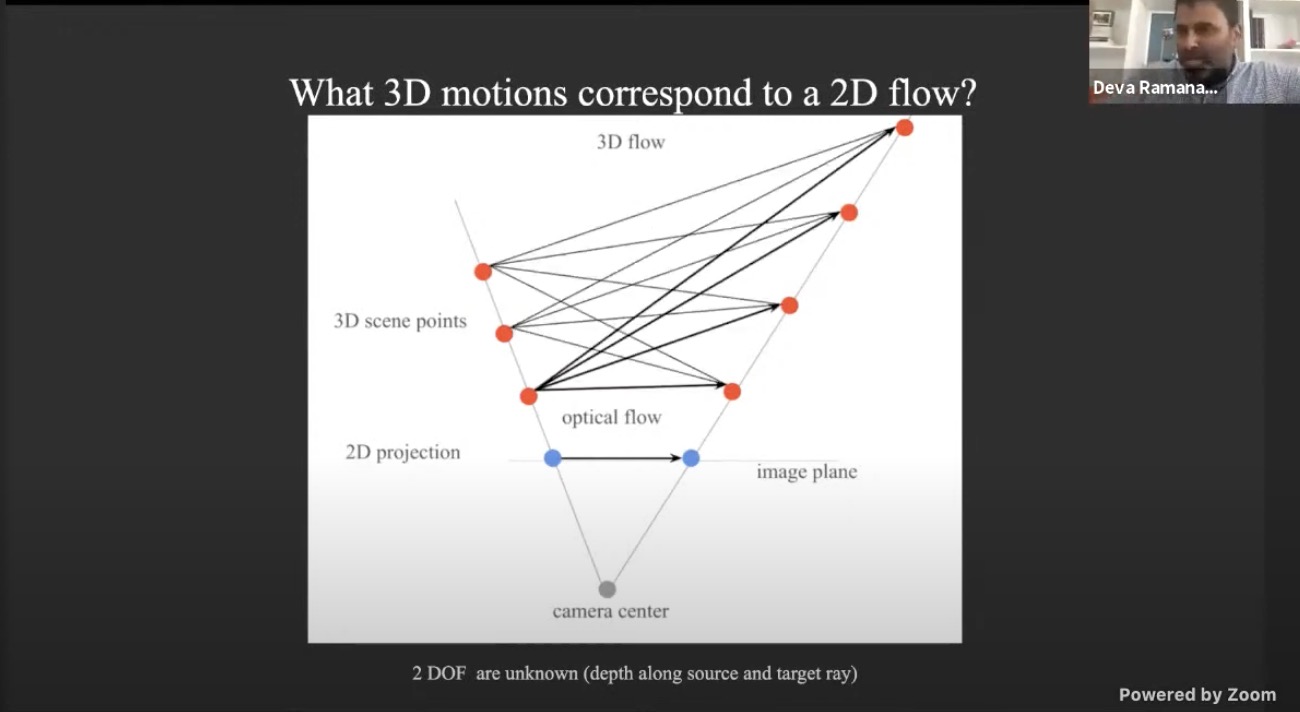
- Upgrading optical flow to scene flow
- youtube talk
- Deva Ramanan@CMU, Argo AI
- optical flow vs scene flow
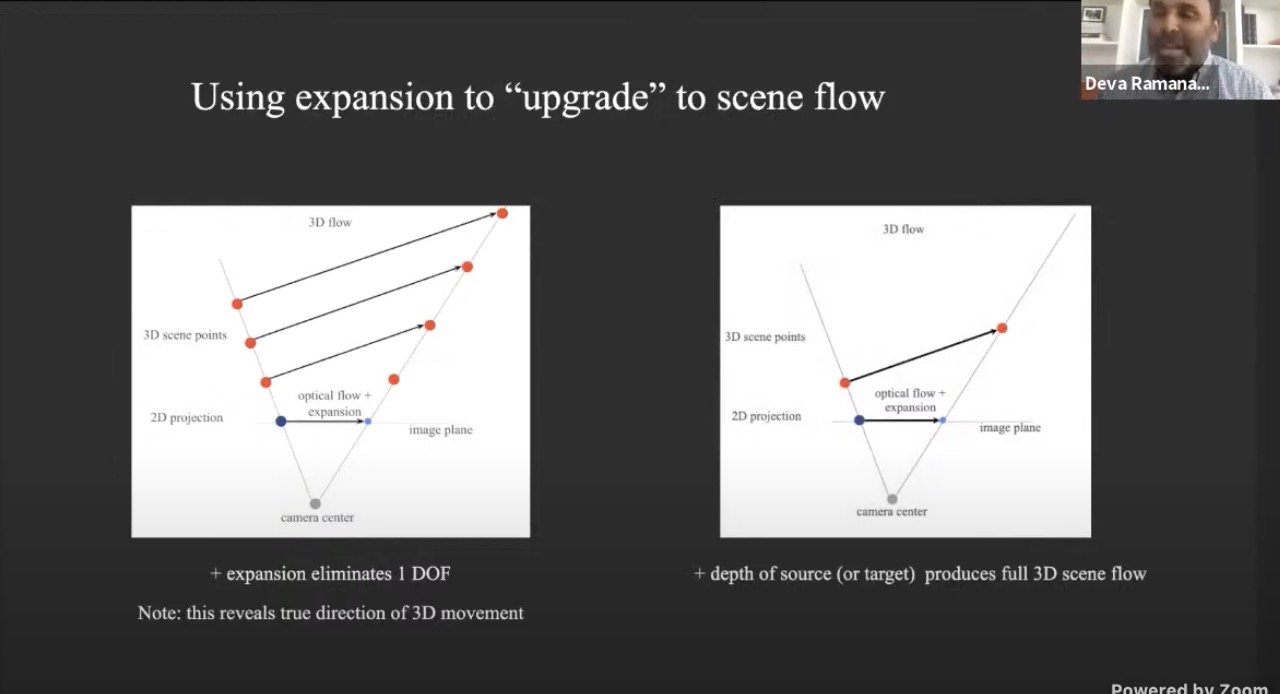
- Scale changes reveal relative detph
- Now eliminates 1 DoF, we know the direction of the 3D scene flow
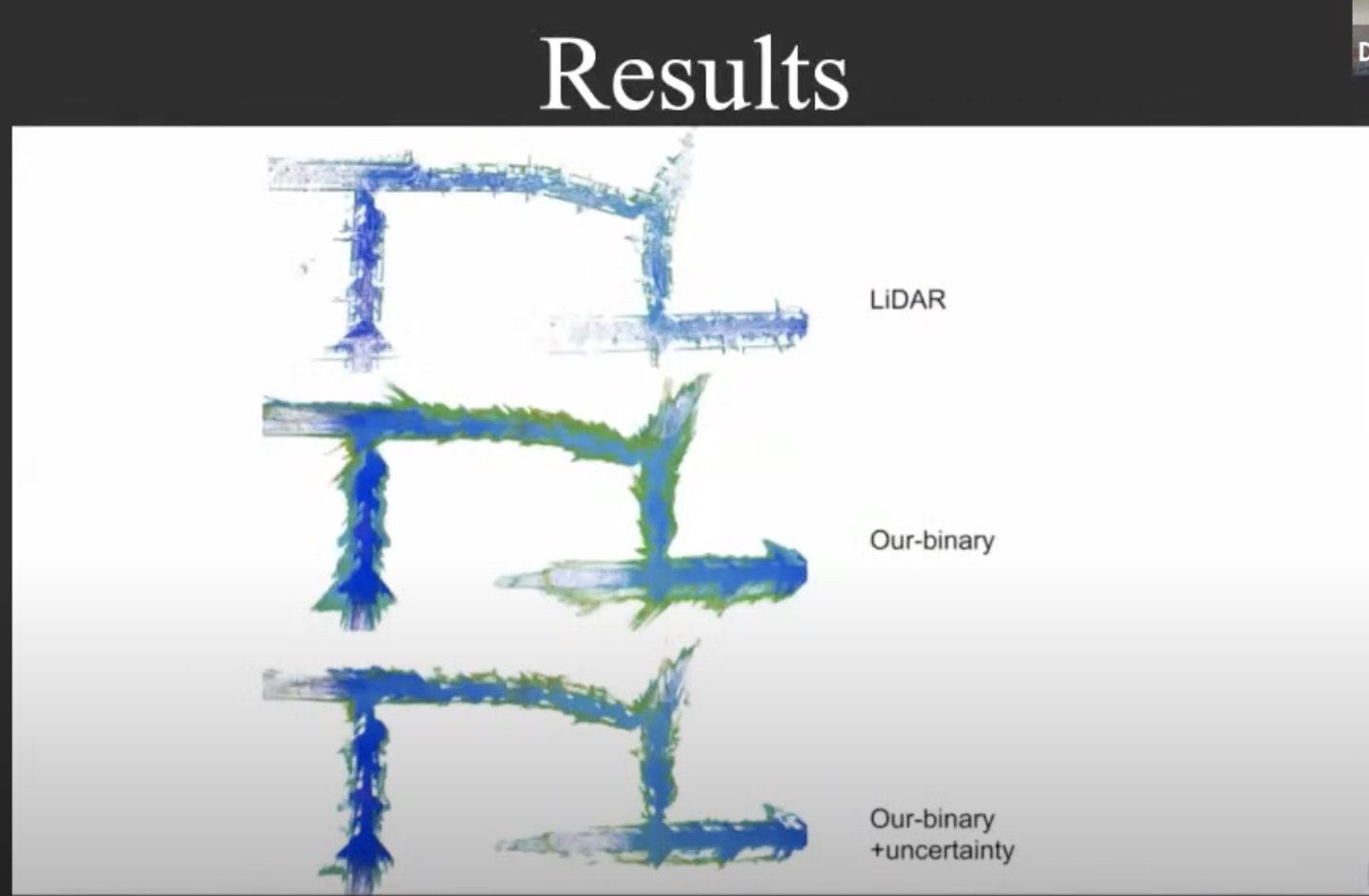
- Depth uncertainty
- uncertainty through discretization
- Stitching depth map based on confidence score
- Monocular 3D
- Xiaoming Liu@MSU
- Monocular image based and video based (under review) 3D object detection
- kinematic 3D object detection with mono videos
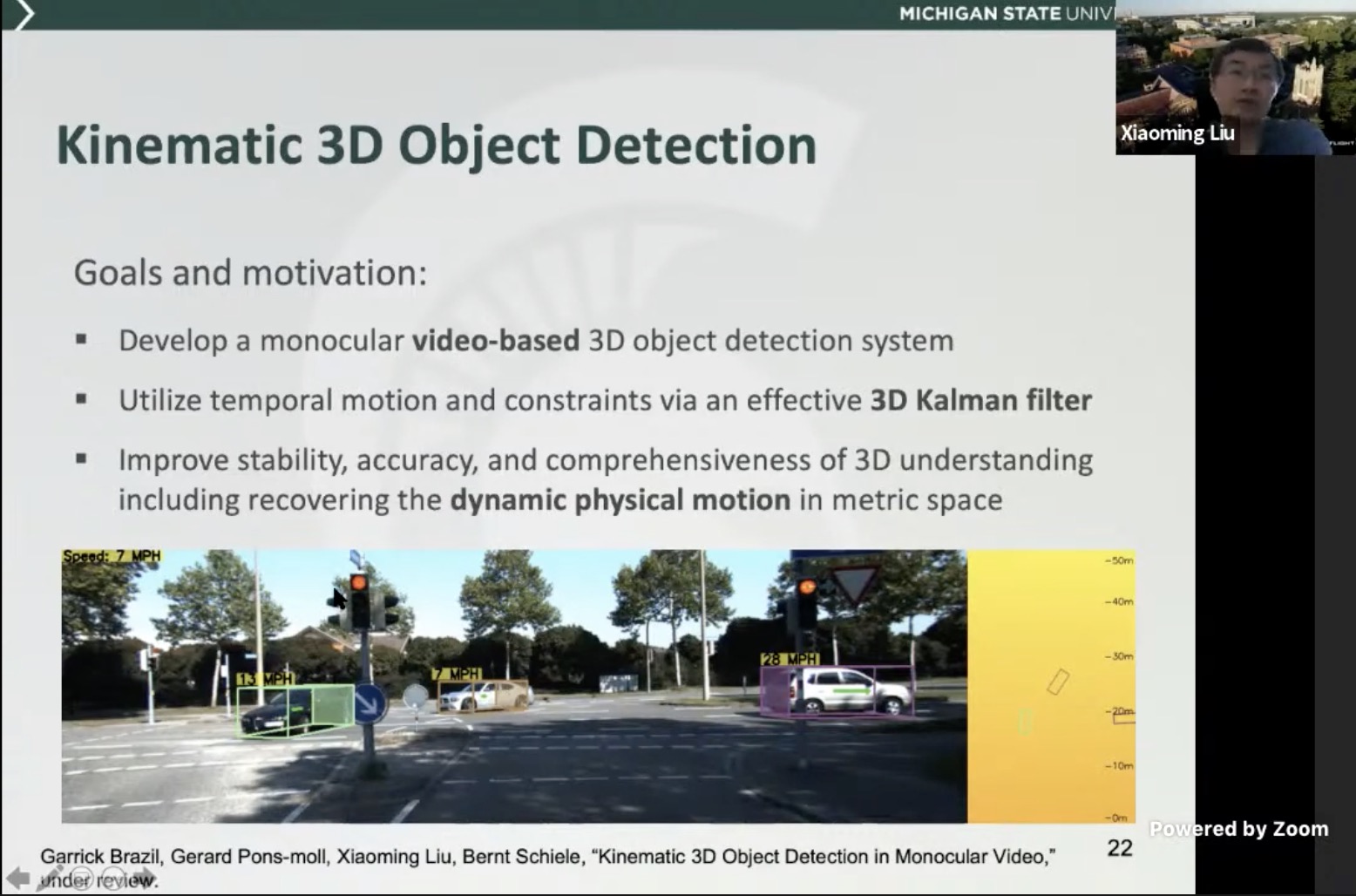
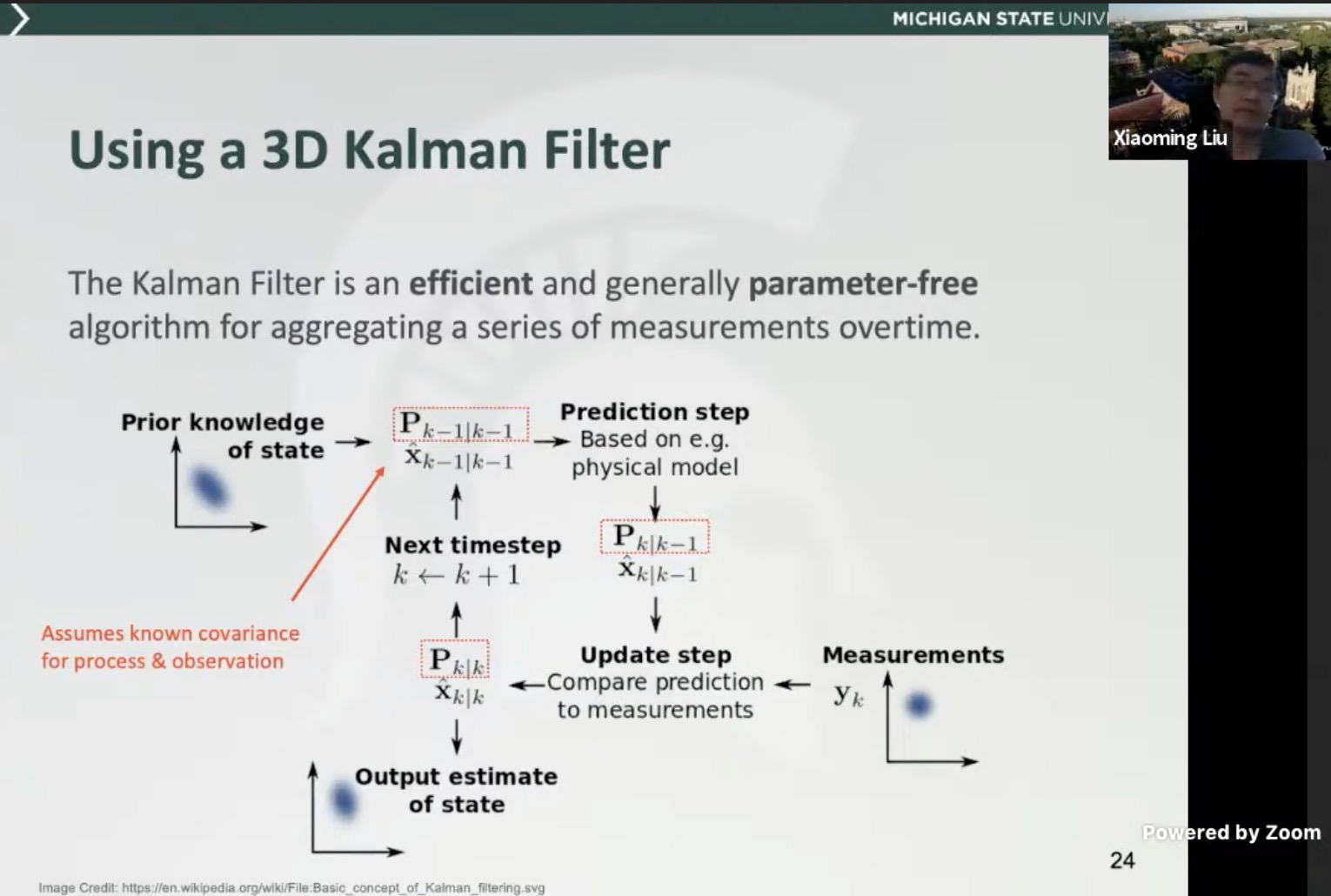
- use a 3D kalman filter to limit constraints
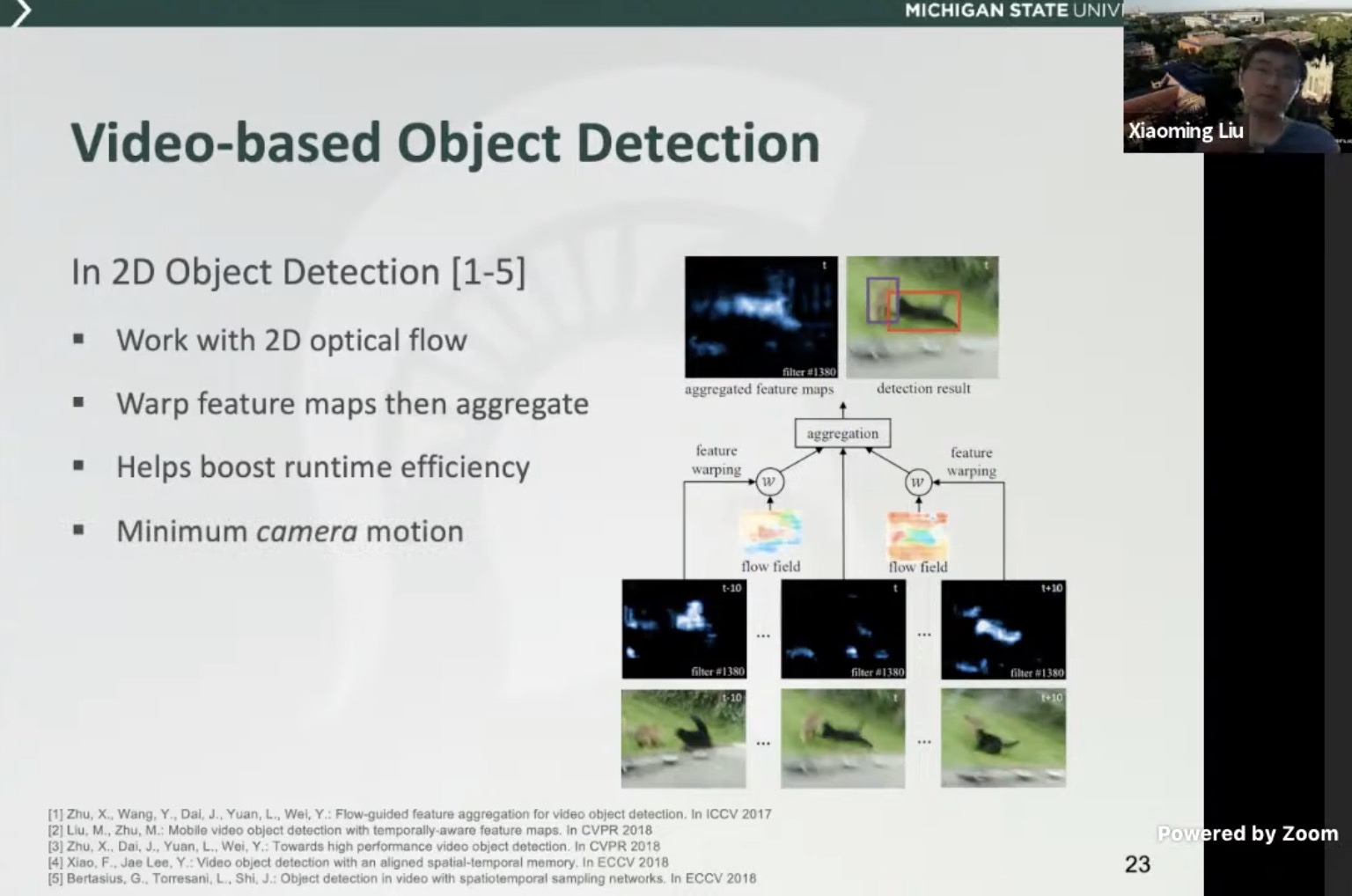
- Video based 2D/3D object detection
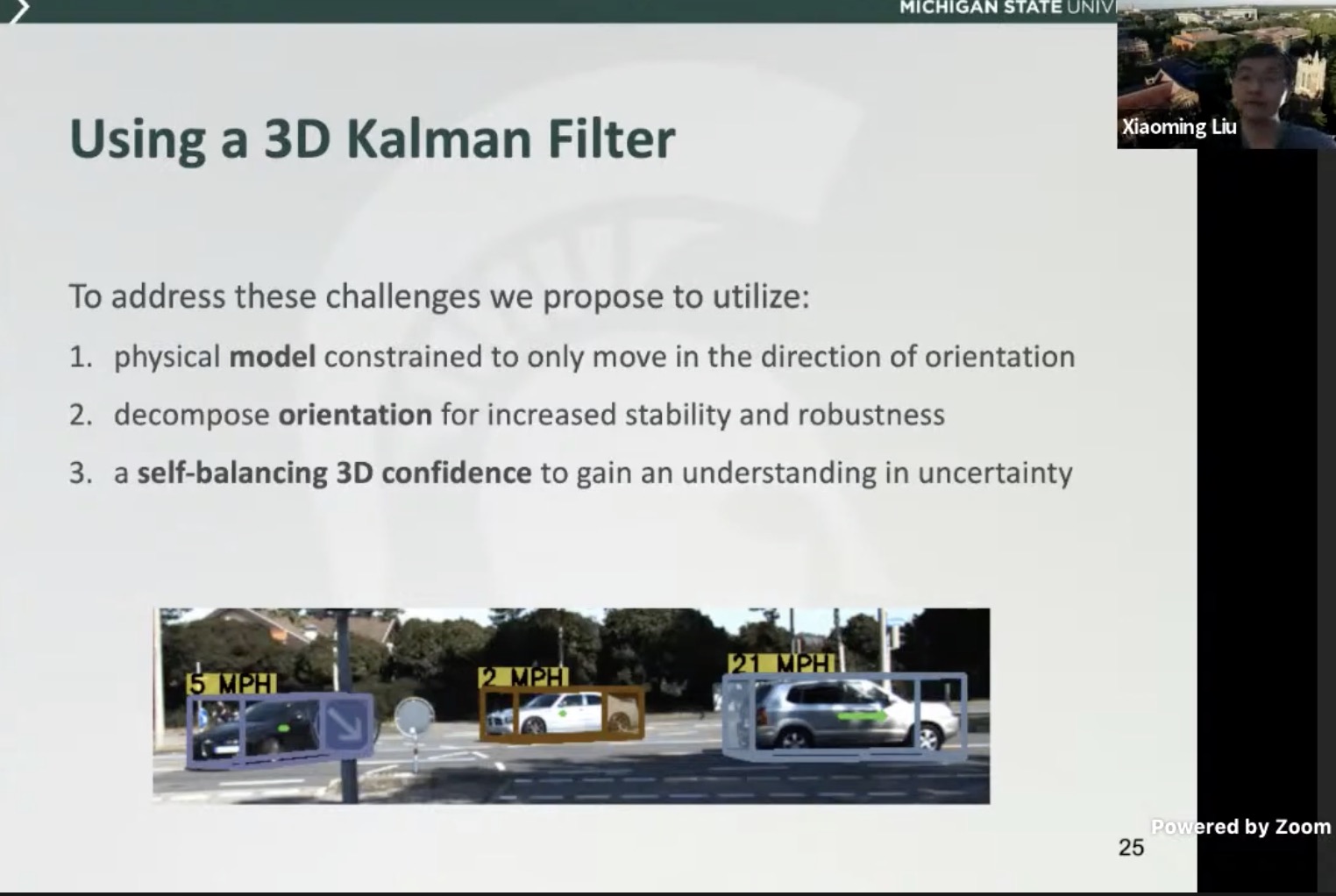
- physical model constrained only to move in the direction of orientation
- Self-balancing IoU that encourages higher conf for better IoU (localization)

- overall architecture
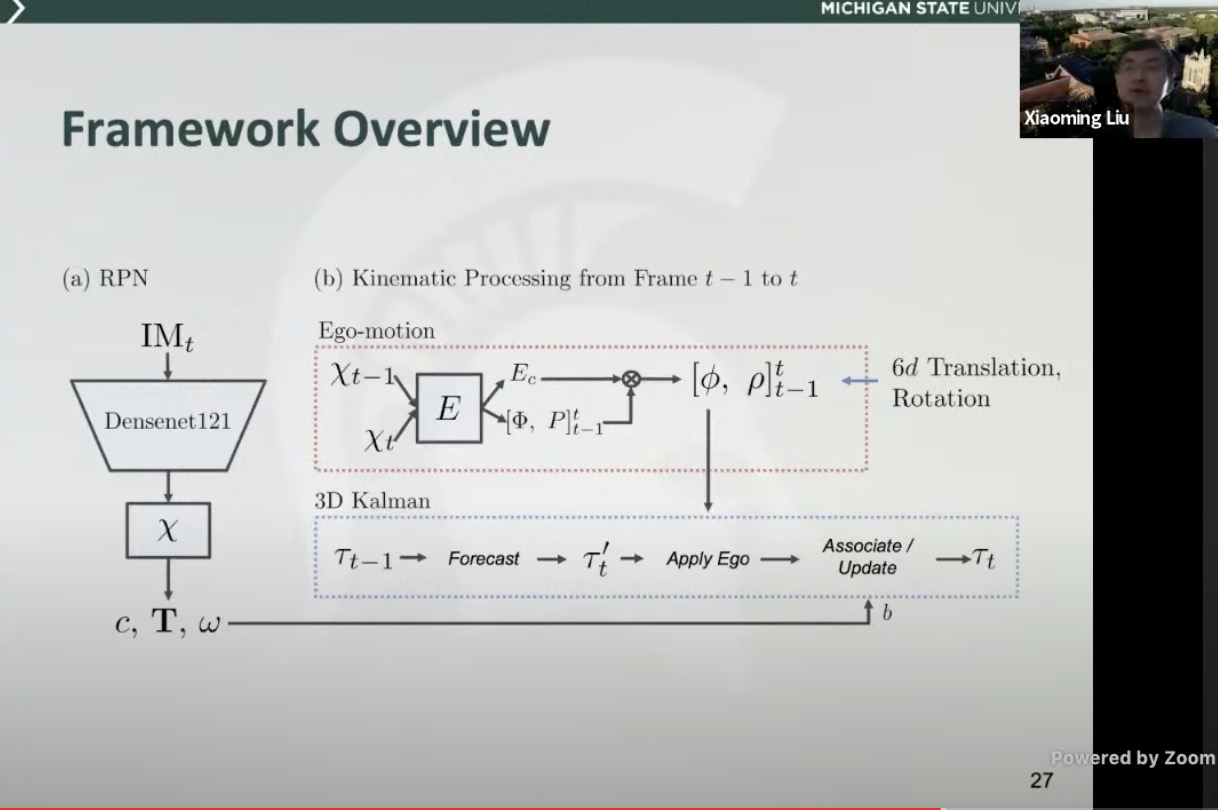
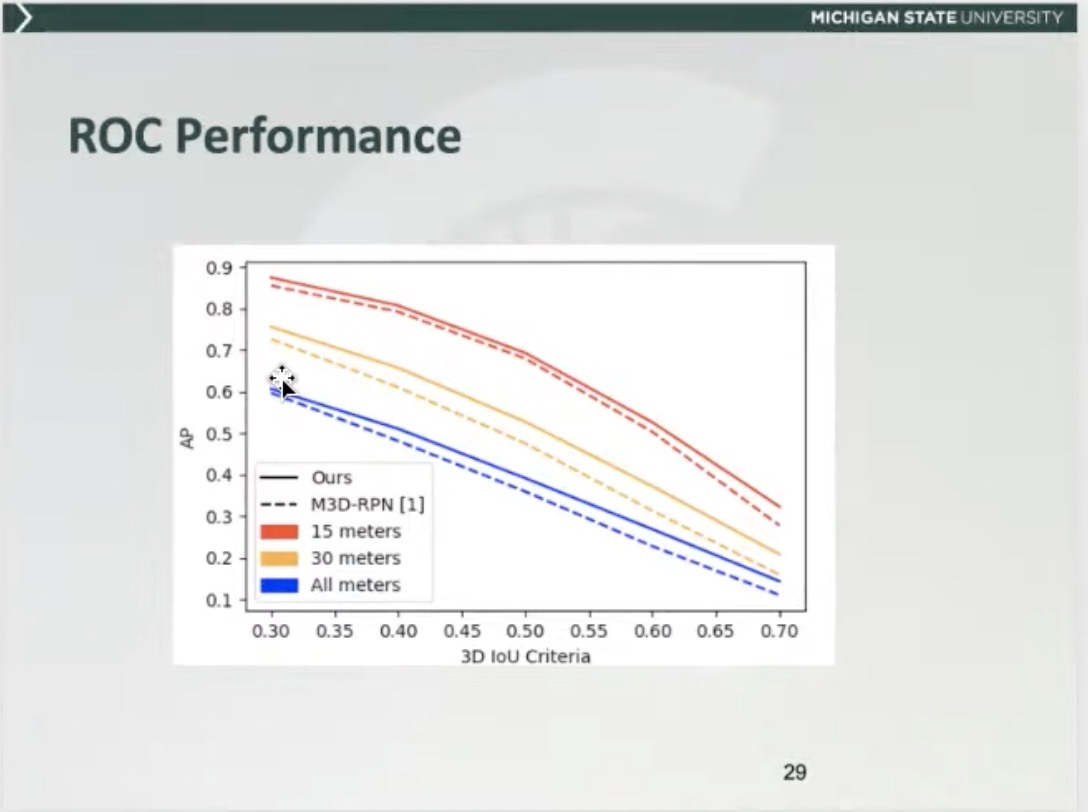
- limitation in mono3D is mainly due to poor localization (at lower IoU threshold, recall is higher)
Safe Artificial Intelligence for Automated Driving
Learning and understanding single image depth estimation in the wild
All talks and slides are uploaded.
Visual Recognition for Images, Video, and 3D
All talks and slides are uploaded.
All About Self-Driving
- Hardware
- Ultrasound: only one measurement, spherical distance, can use cross-echo to boost performance.
- microphone: provide early alert to sirens, background noise signature, limited geometry with beam forming
- End to end vs traditional stck
- Maps/Sensors –> Perception –> Prediction –> Planning –> Control
- Interpretable intermediate representation
- 3D Perception:
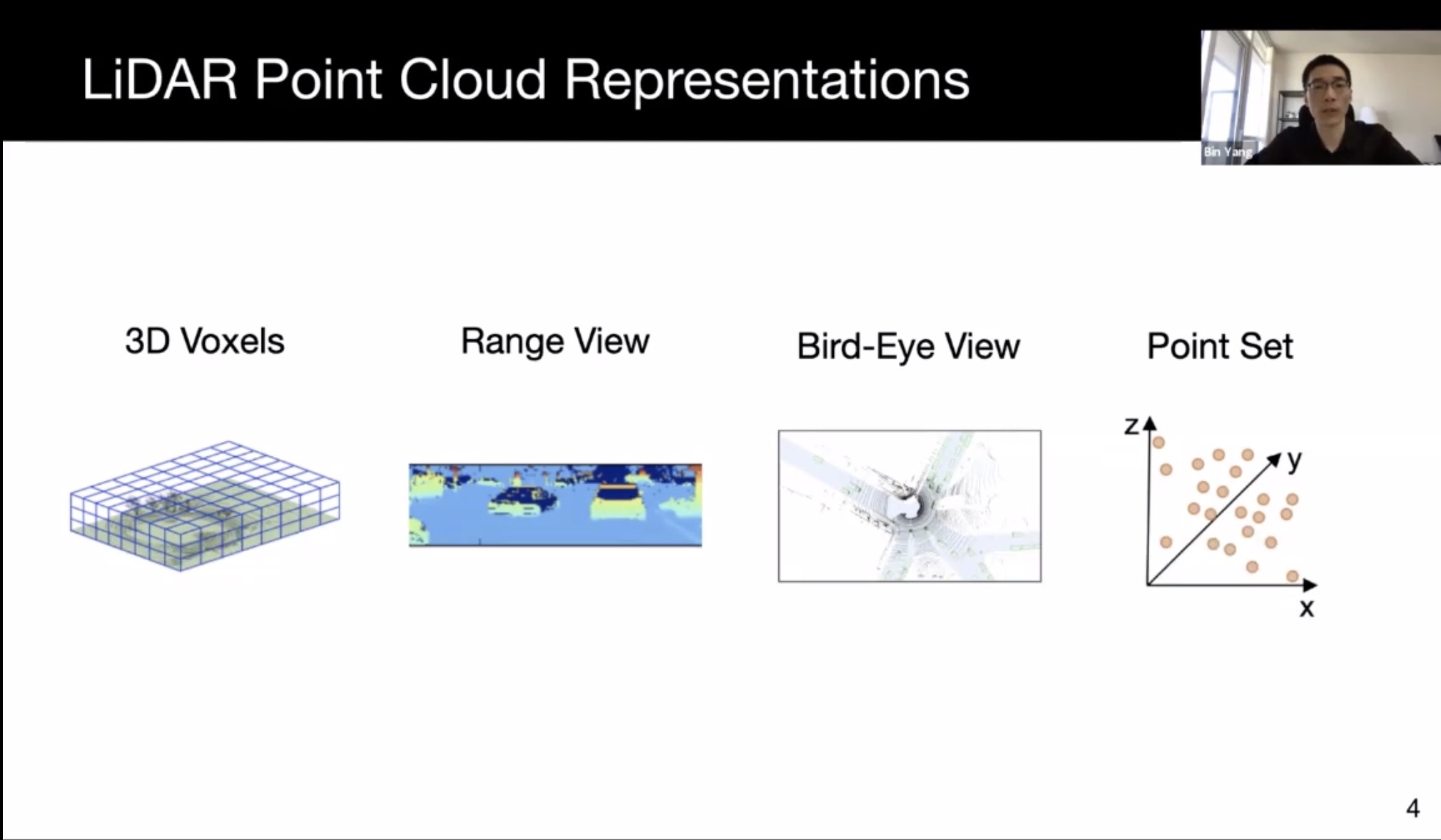
- Lidar:
- 3d voxel: keeps metric space, but large sparsity, and computation grows cubically
- range view: compact, panorama range for lidar. Efficiently processable by 2D CNN. Hard to incorporate prior knowledge
- BEV: also sparse, can use 2D conv efficiently
- point set: preserve point location; harder to learn; irregular memory access and dynamic kernel computation
- Sparse convolution, sparse block convolution; use road map mask and object mask to speed up computation
- One stage (real time, but less accurate) and two stage
- PIXOR
- Mono3D:
- Lift to 3D at output: unsatisfactory
- Lift to 3D at input: pseudo-lidar
- Lift to 3D at feature map: OFT, can work without depth estimation. Reason depth in feature map
- Fusion lidar/camera
- Fusion in Cascade: F-pointnet, can be hard for occluded object
- Fusion at output: safety from redundancy, mono3D + lidar3D
- Fusion at input: pointpainting, limited exploitation of camera data
- Fusion at Feature: PointFusion, ContFuse; more robust to small calib errors; more computation cost
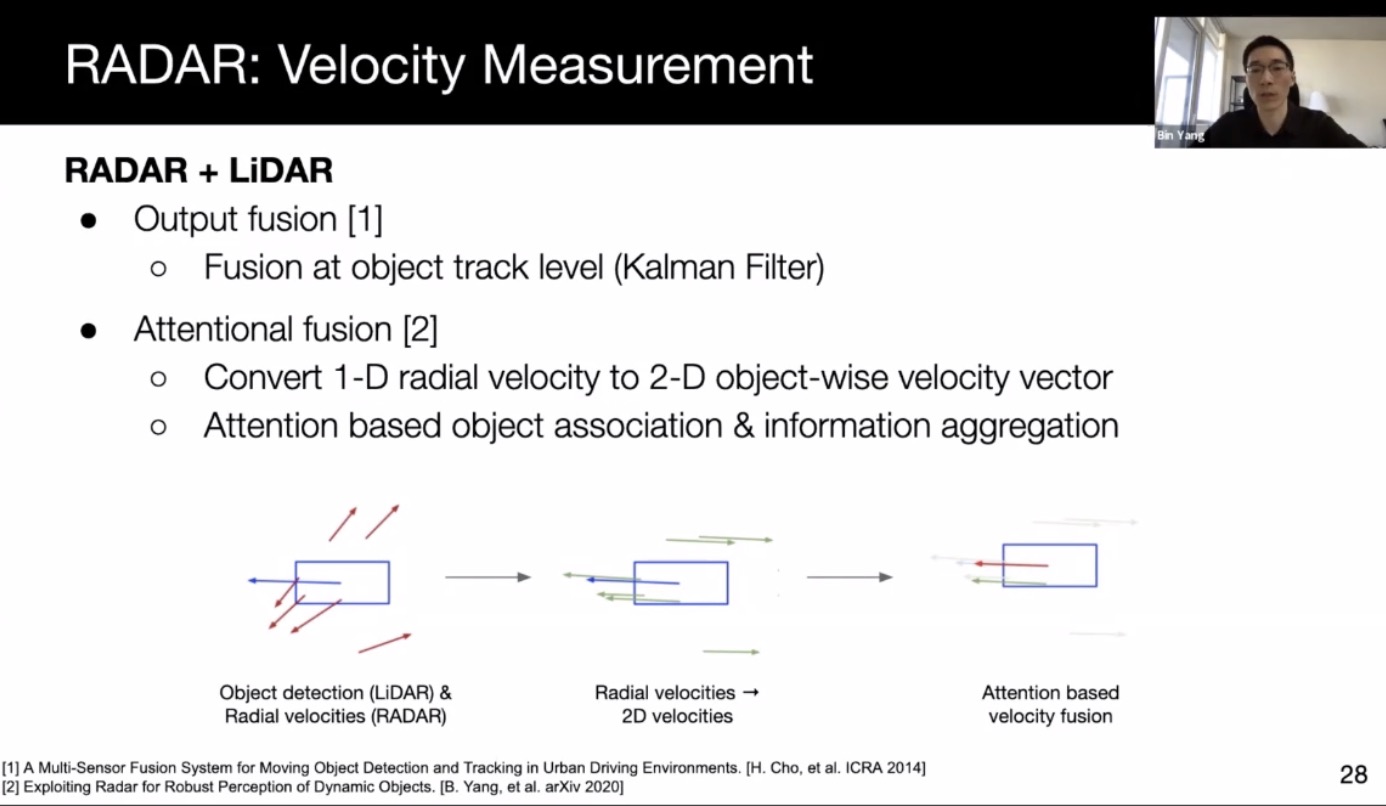
- Radar
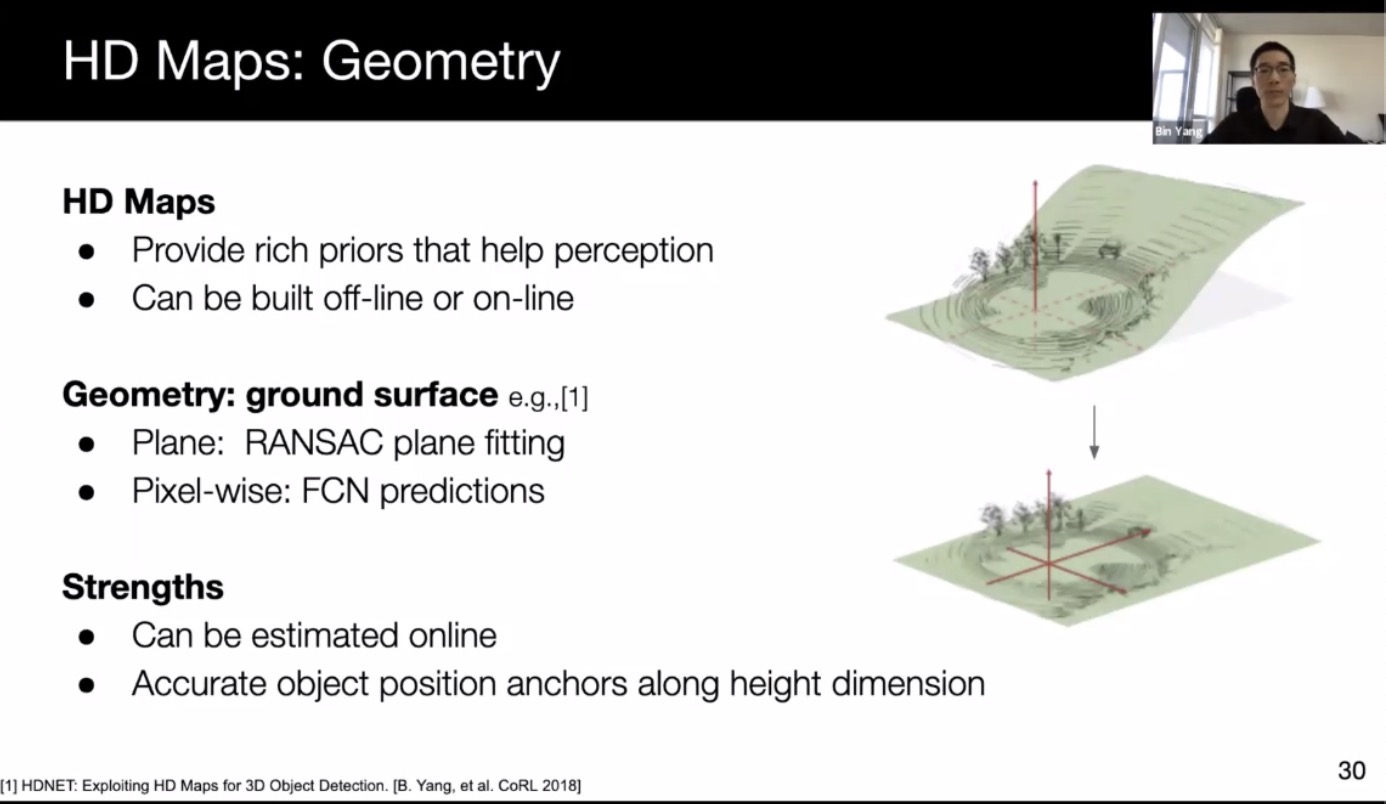
- HD maps
- Geometric correction by subtracting ground height
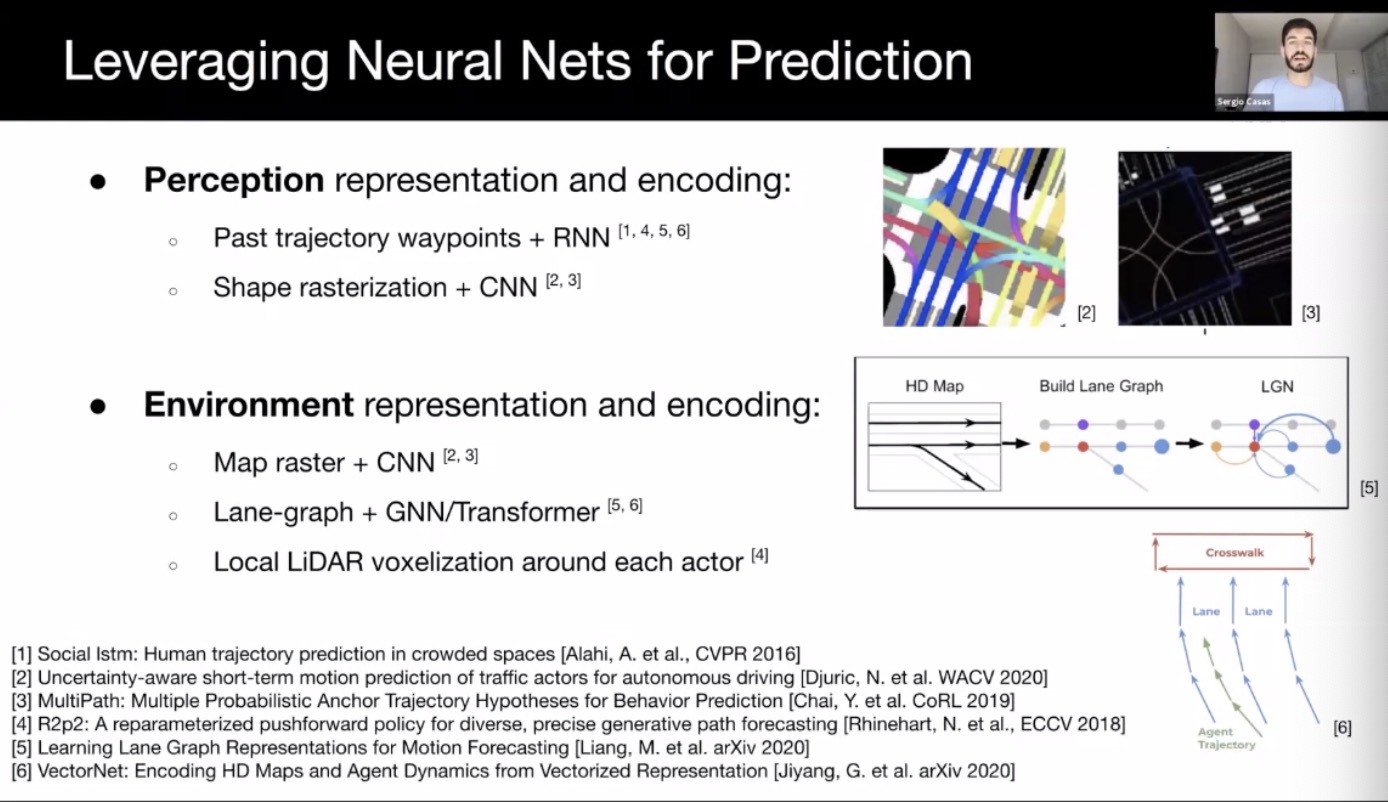
- raster map (CheuffeurNet)
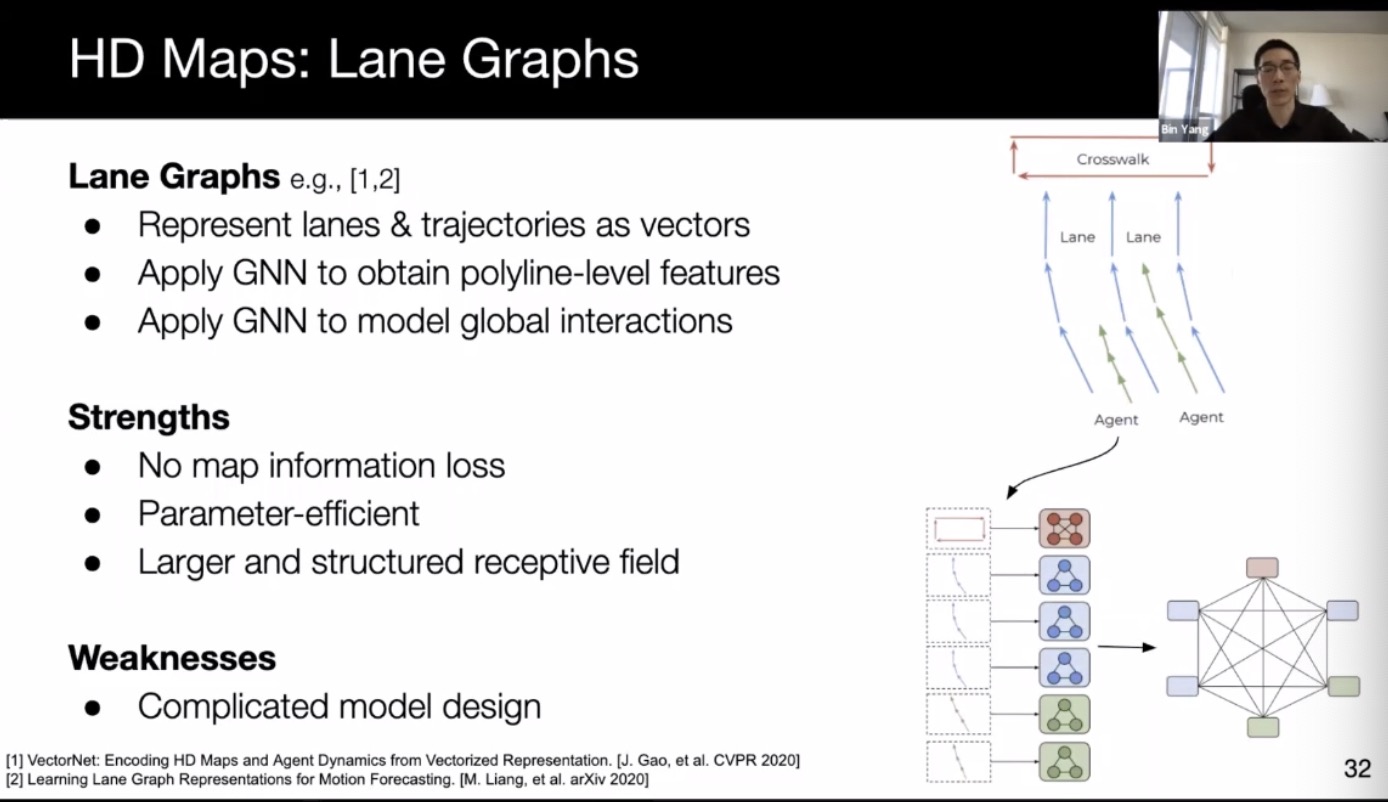
- Lane graph (vector net)

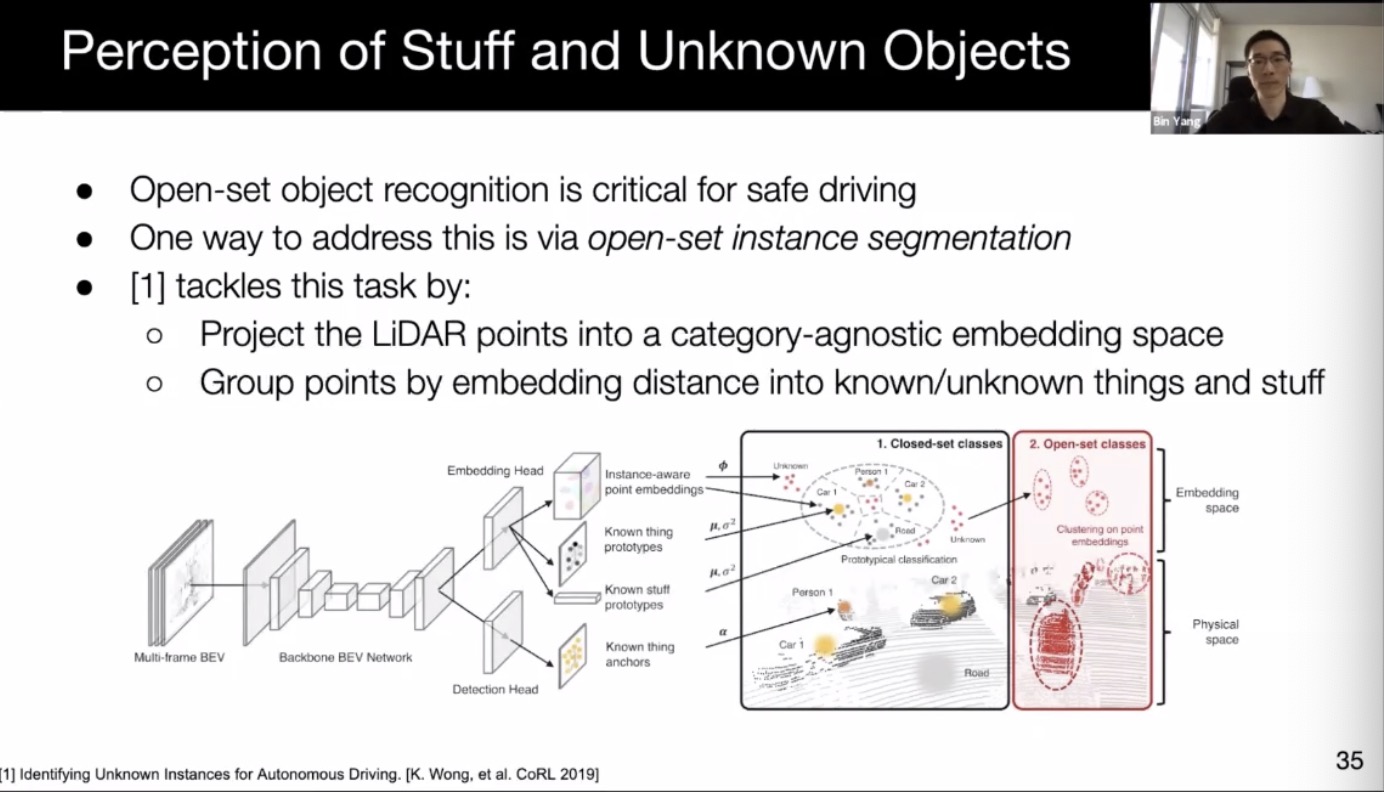
- Detecting the unknown by projecting to an semantic-agnostic space
- Lidar:
- Prediction
- tradditional
- Unroll the tracker’s state with a kinematic model (linear motion model, constant turn rate, etc)
- Maneuver-based, classify first
- Using neural network for prediction, with HD map
- Joint perception and prediction
- Predicting each object individually may lead to collision
- Using social pooling to extract social vector to model interaction
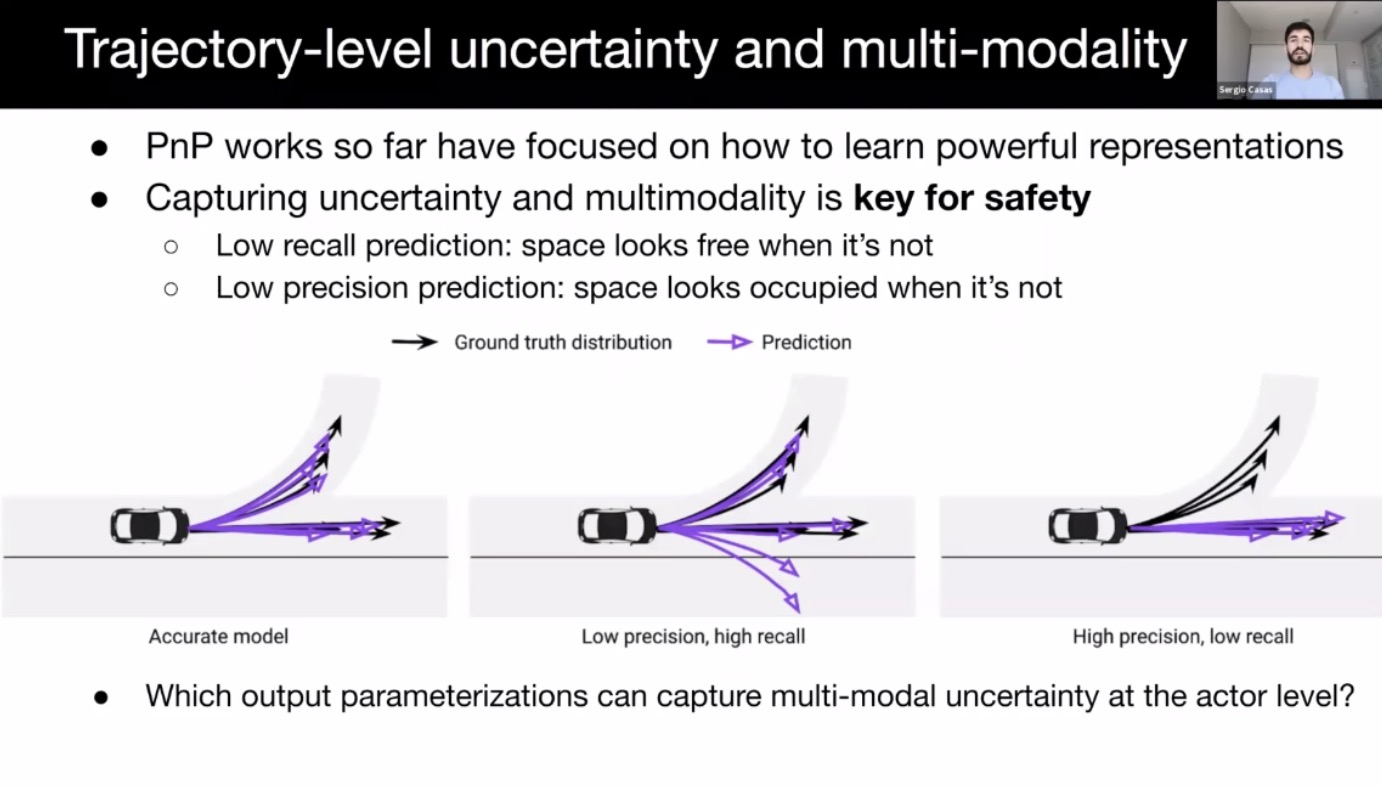
- Trajectory uncertainty and multi-modality
- mixture of Gaussian, occupancy grid, trajectory sets (coverNet; seems most promising), Auto-regressive (R2P2, trajectron; slow, compounding error)
- Use prior knowledge in precise multimodal prediction; less off road/map behavior
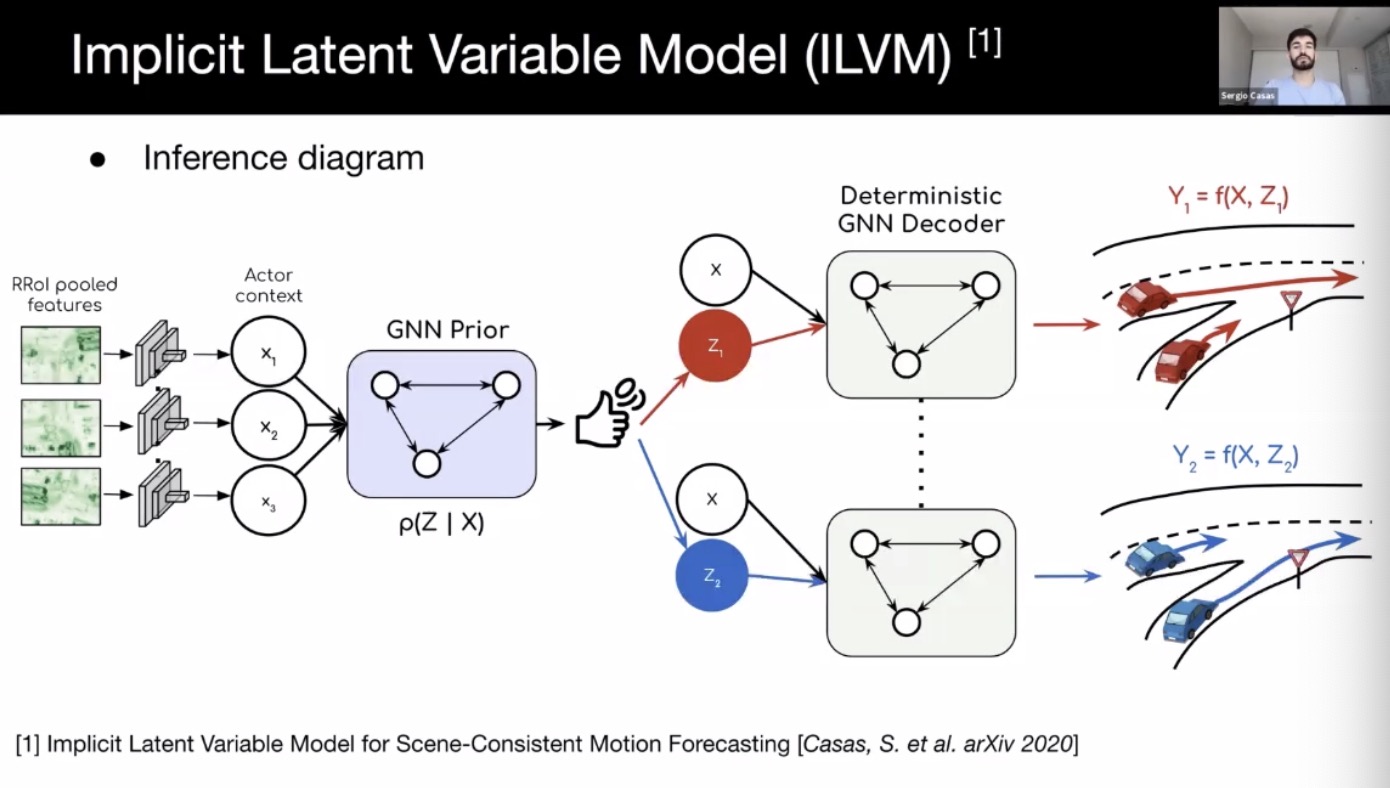
- Scene-coherent sampling: social auto-regressive methods, using states of other actors when unrolling. Alternatively, ILVM (implicit latent variable model for scene-consistency motion forecasting) can be used for parallel sampling.
- tradditional
- Motion planning and control
- Route, behavior, trajectory planning
- Route planning: A*, Dijkstra algorithm
- Behavior planning: reduce complexity in trajectory planning
- State machine: hard to generalize
- Optimal driving corridor

- Trajectory planning:
- Continuous optimization (variable execution time, problematic for safety-critical applications)
- Sampling based methods (suboptimal solution)
- Continuous optimization (variable execution time, problematic for safety-critical applications)
- Control
- Path following
- Model predictive control
- Learned joint planning and control
- Building HD Maps
- Human annotation is extremely tedious.
- Using DL to help automate the process
- Localization within HD Maps
- GNSS, camera, lidar, IMU, wheel odo
- topological maps (openstreetmaps)
- challenges: sensor noise, dynamic objects, degenerate geometry, environment changes (construction site)
- minimal (3 DoF lat, long, yaw) vs complete 6 DoF
- Localization as State Space Estimation
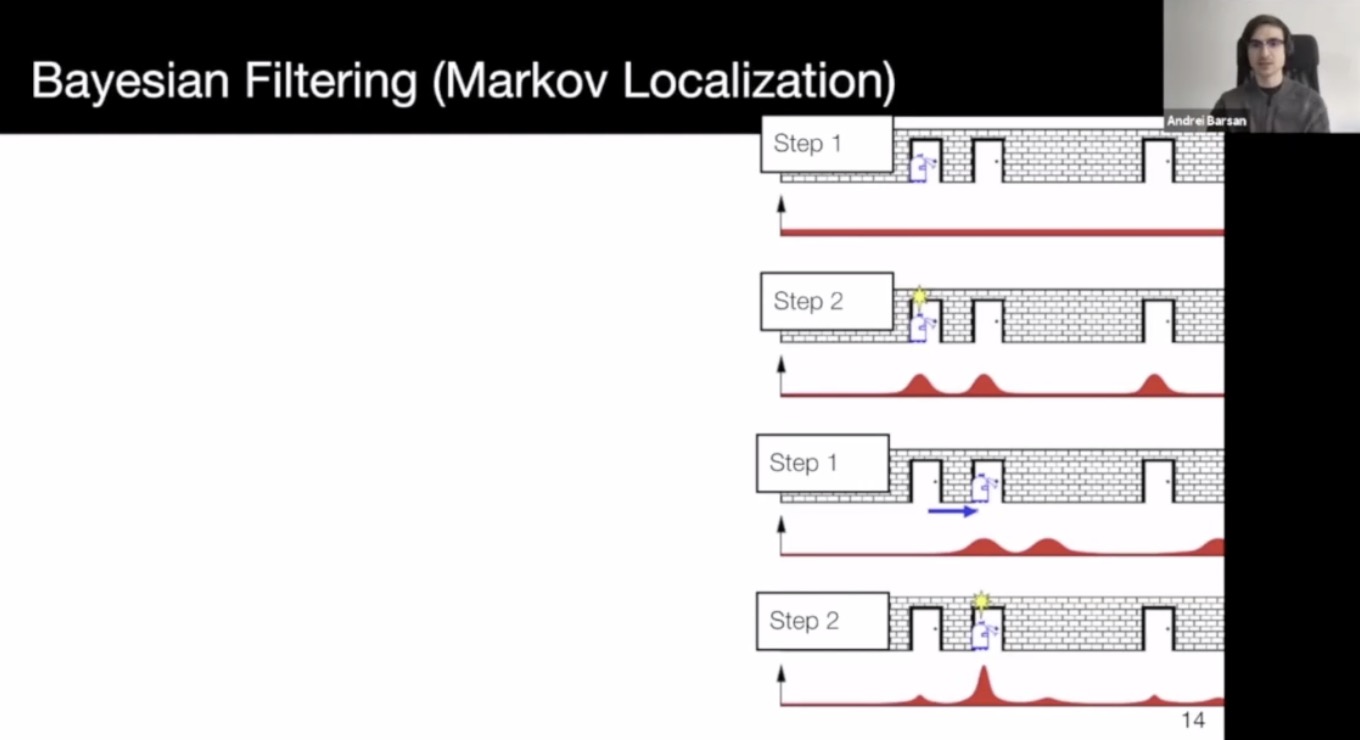
- Bayesian filter: Usually not tractable in practice
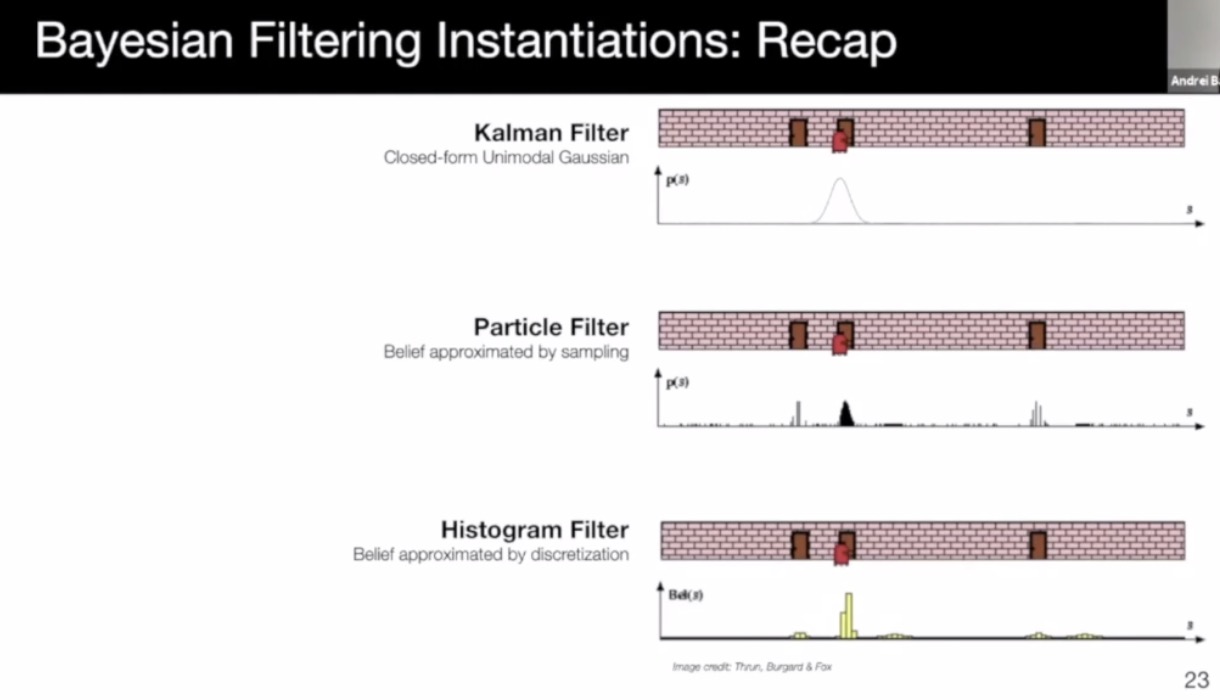
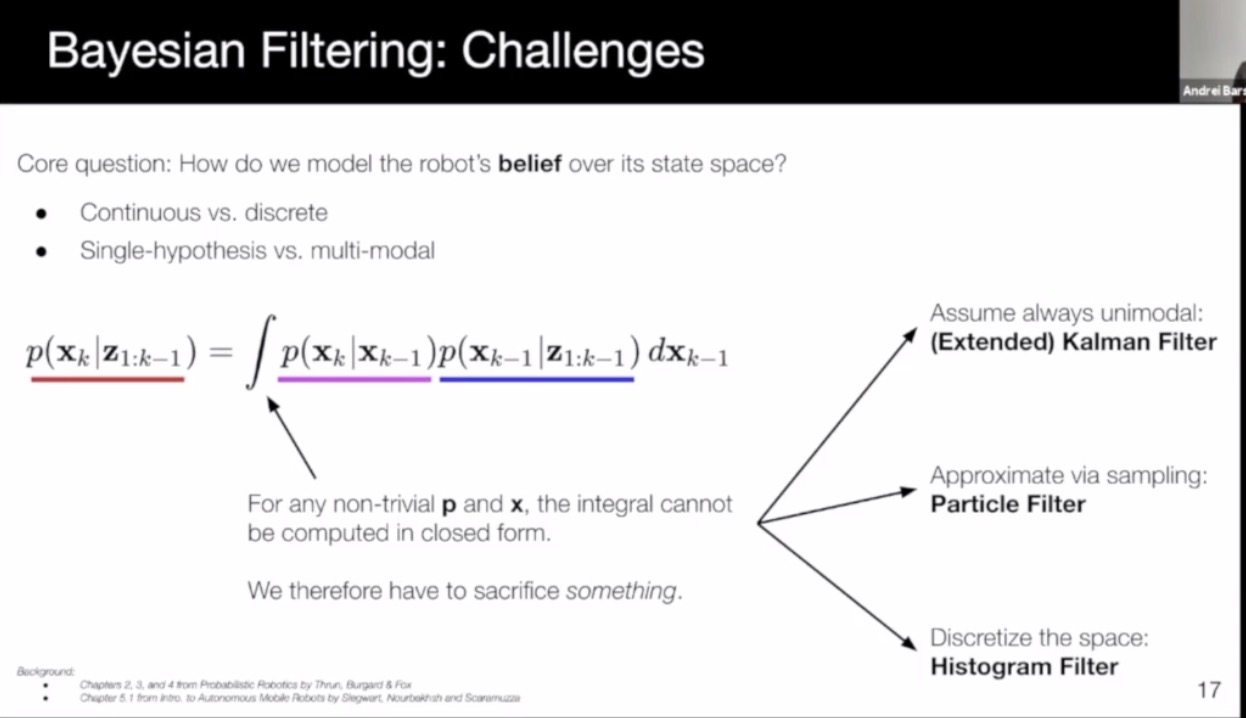
- Kalman filter: efficient, compact, but gaussian-like and unimodal (single hypothesis tracking)
- Particle filter: non-parametric, any distribution, supports multi-modal, but may suffer from mode collapse due to insufficient sampling
- Histogram filter: any distribution, multi-modal, avoids unimodal collapse, but memory intensive
- Existing methods: (6 methods)
- RTK: need direct satellite LoS
- Semantic matching: light weight maps, cannot achieve cm level
- geometric alignment: lidar to 3D HD map: need a good initialization; storage of detailed HD Map is expensive; can degenerate in tunnels
- Camera to lidar matching: map with Lidar, match with camera; cm accuracy;
- place recognition: image retrieval; not cm level accuracy
- Lidar reflectance matching: need good initialization; can be robust to outliers, and can be implemented efficiently; vulnerable to lidar mis-calibration
- Recent methods:
- learn to localize with lidar to HD map matching (CVPR 2019): main drawback is the large storage space of HD Map. Learn compressed representation with DL. (3 orders of magnitude less space, with marginal degradation in accuracy.)
- Global localization
- Initialization, and recovery
- Challenges: the same place can be different, weather, time of day, season, etc
- Pose regression/retrieval-based
A Comprehensive Tutorial on Video Modeling
- Human activity understanding in videos
- Controlled collection vs In the wild
- Trimmed and untrimmed: are there irrelavant information in video?
- Single person vs multi-person
- Temporal action detection: automatic highlight extraction
- Input: untrimmed video
- output: start and end timestamps, and action labels
- Strongly supervised vs weekly supervised
- Action segmentation:
- Similar to temporal detection
- output: action segmentation per frame.
- Online vs offline
- Modeling longer timespan
- RNN or 3D CNN: but still intractable to model longer sequence
- one solution: temporal segment network: model from sparse sampling
- attention vs graph conv
- to address regular conv (computation efficiency)
- non-local CNN
- ST-GCN (spatial-temporal graph conv networks)
- Efficiency:
- pseudo-3D conv
- Decoupled 3D conv
- Recent SOTA (2014-2020)
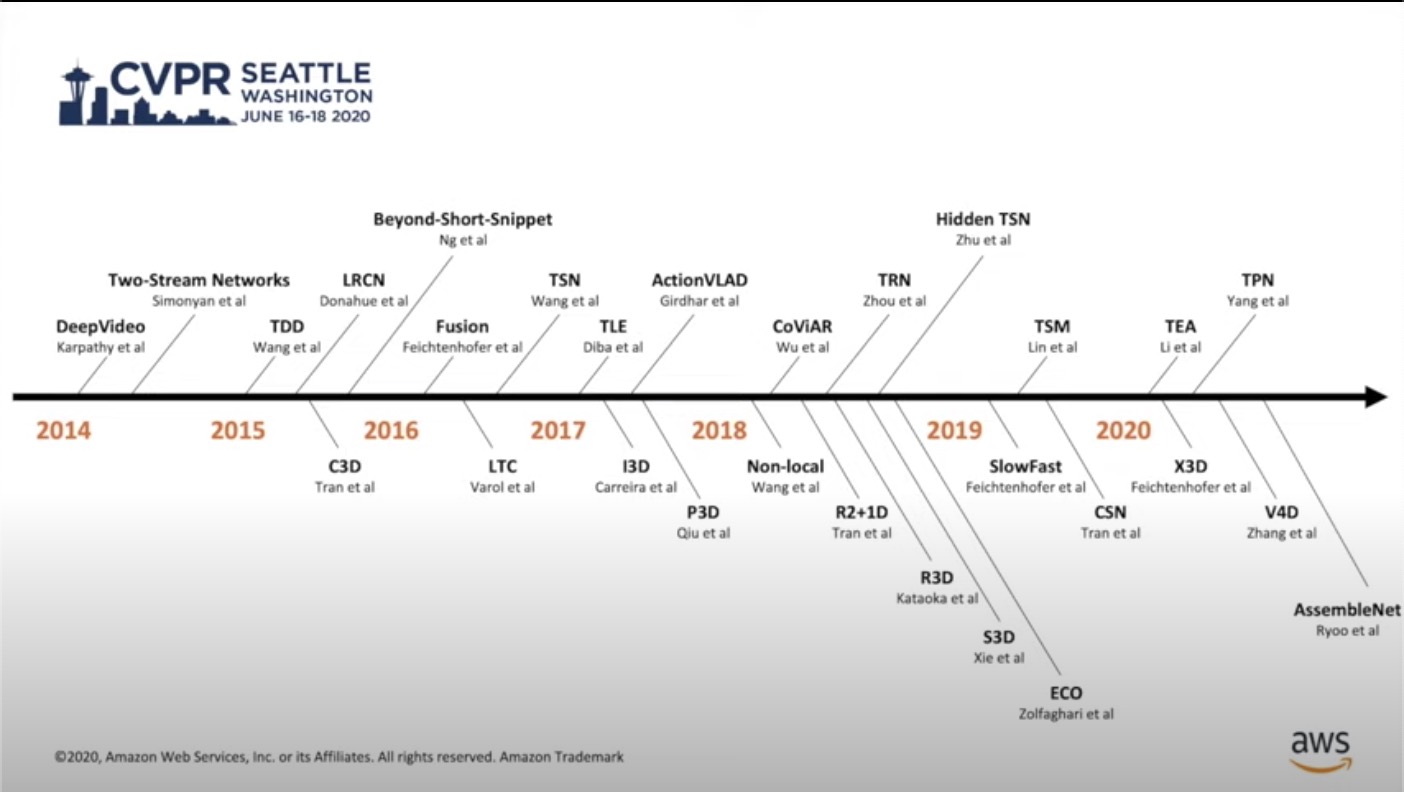
- DeepVideo by Karpathy: fovea and context streams
- Two stream methods: spatial stream + temporal stream (single frame + optical flow)
- But optical flow calculation and loading I/O slows down training and inference
- 3D CNN
- C3D
- I3D (inflating and boostraping)
- P3D: factorize 3x3x3 into simpler kernels
- non-local
- slow-fast (cf. two stream models. slow-fast models two temporal speeds, not spatial and temporal modeling)
- X3D: improved slimmed slow-fast
- Other works:
- Directly inferencing video codec
- draw inspiration from optical flow, and use CNN to learn optical flow on the side
- TSM: Temporal Shift Module for Efficient Video Understanding: temporal shift, suitable for video object detection and edge deployment.
- Decord: An Efficient Video Reader for Deep Learning
- Decoding videos to frames
- takes 10x more space
- I/O bottleneck
- Data storage is huge!
- Random access > sequential read.
- CPU or GPU loading.
- pythonic
- Can be used in many DL frameworks, including pytorch.
- Decoding videos to frames
SCALABILITY IN AUTONOMOUS DRIVING (video on youtube)
- Scaling data and data scaling (with simulation and GAN)
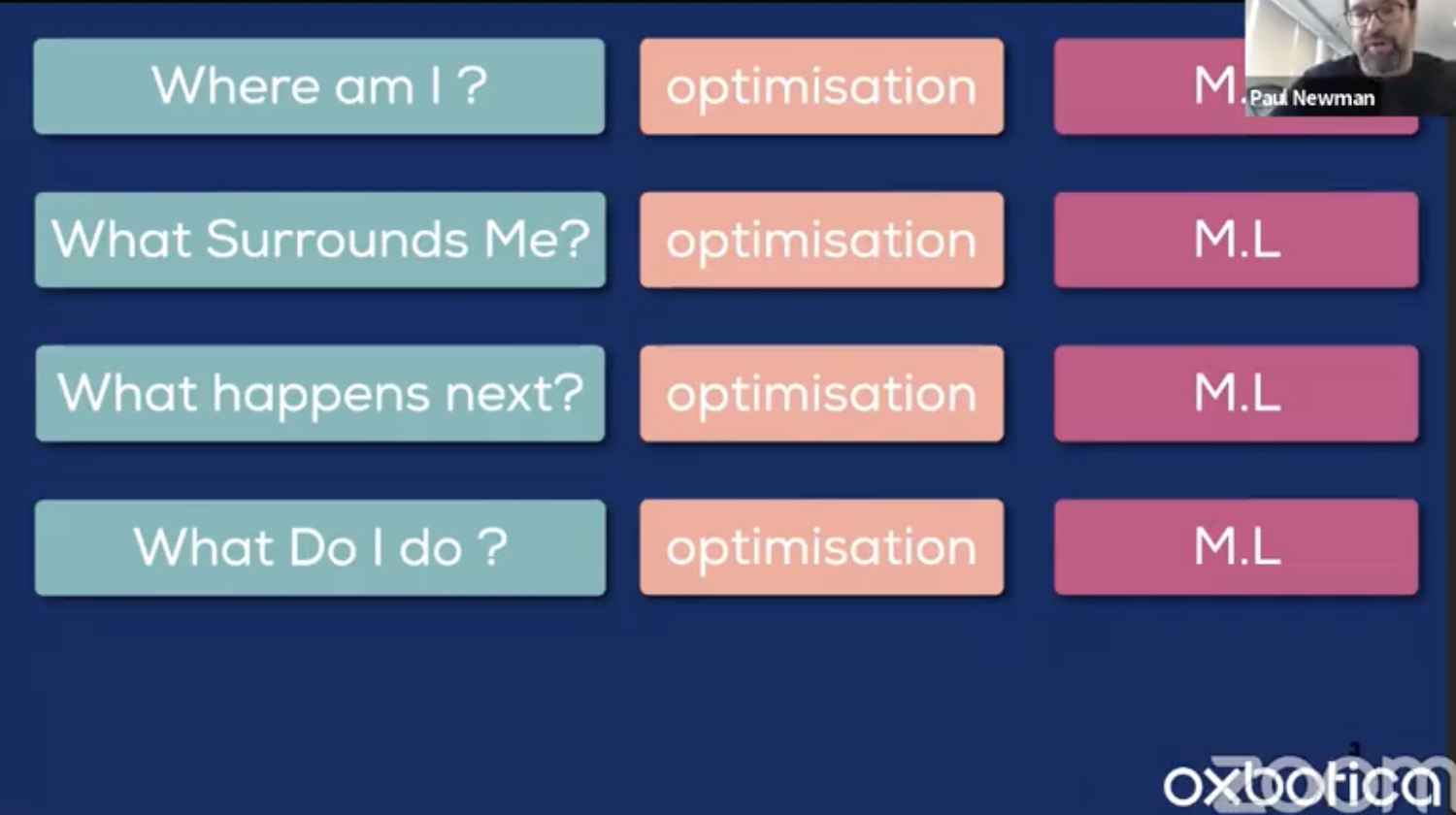
- Paul Newman, Oxbotica & University of Oxford
- The four questions of AD
- Simulator: lidar data is easy to simulate
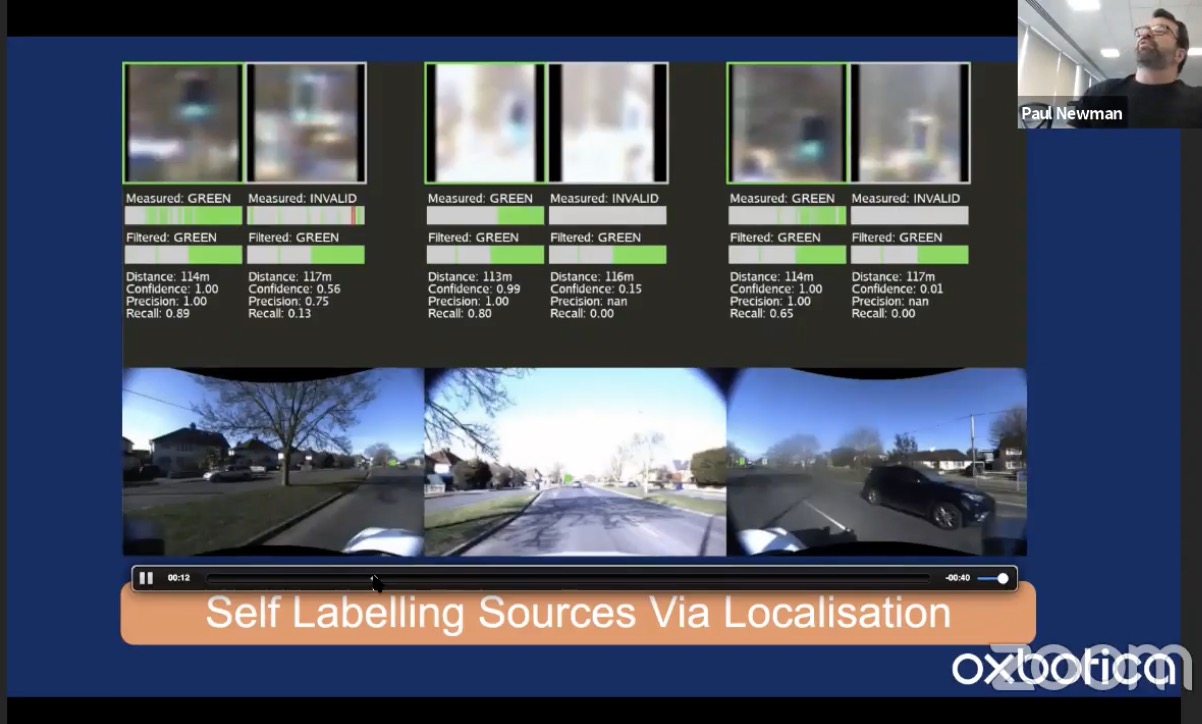
- Experience: drive around the same scene again and again. Self-labeling source via localization + Map: We know where we are, and we know where to look
- Open-loop Maps are free
- Copy road markers to 2D images
- Vision + geometry: depth groundtruth
- This needs to have fully labeled video, and need highly precise localization (< 0.1 deg for YPR)
- Data synthesis. Generate scenes with semantic maps, learning to in-paint
- cycleGAN: not necessarily easy to train, need to tune
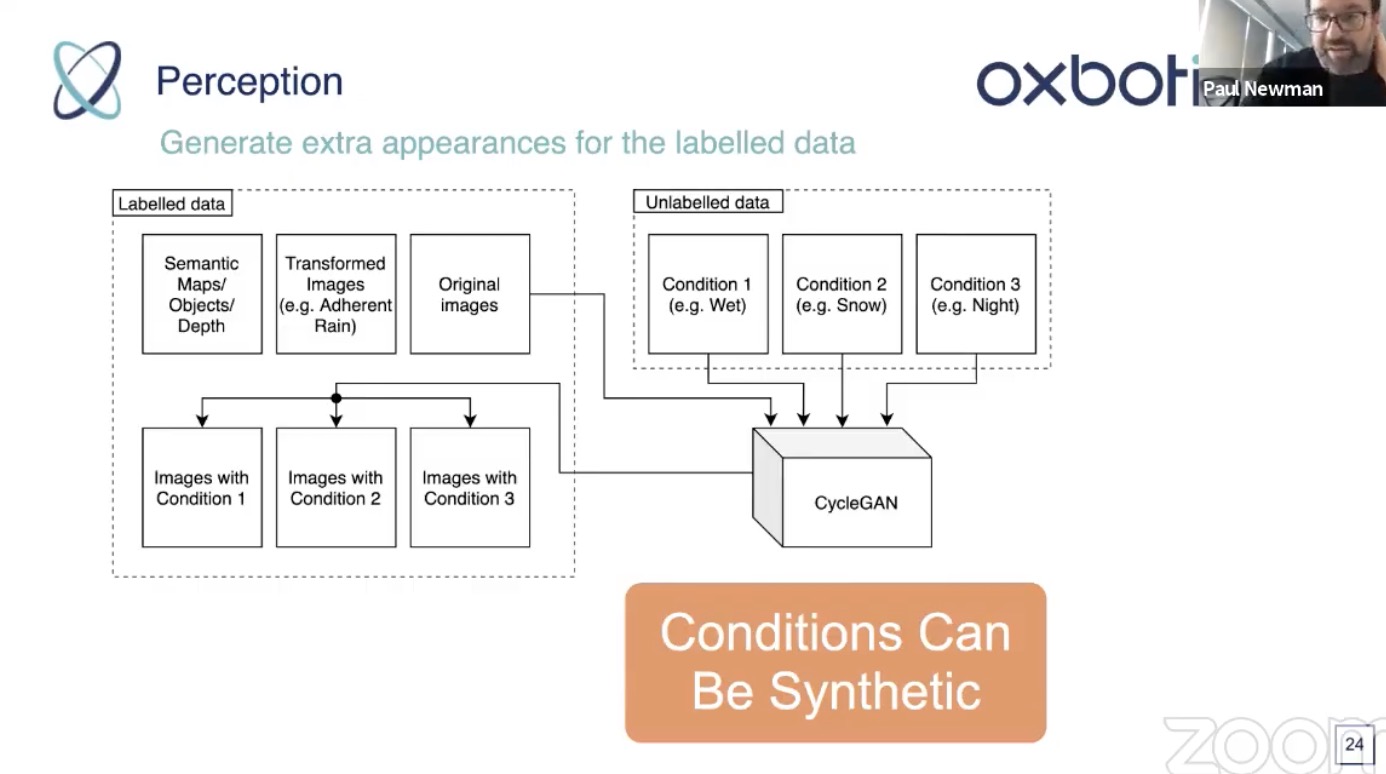

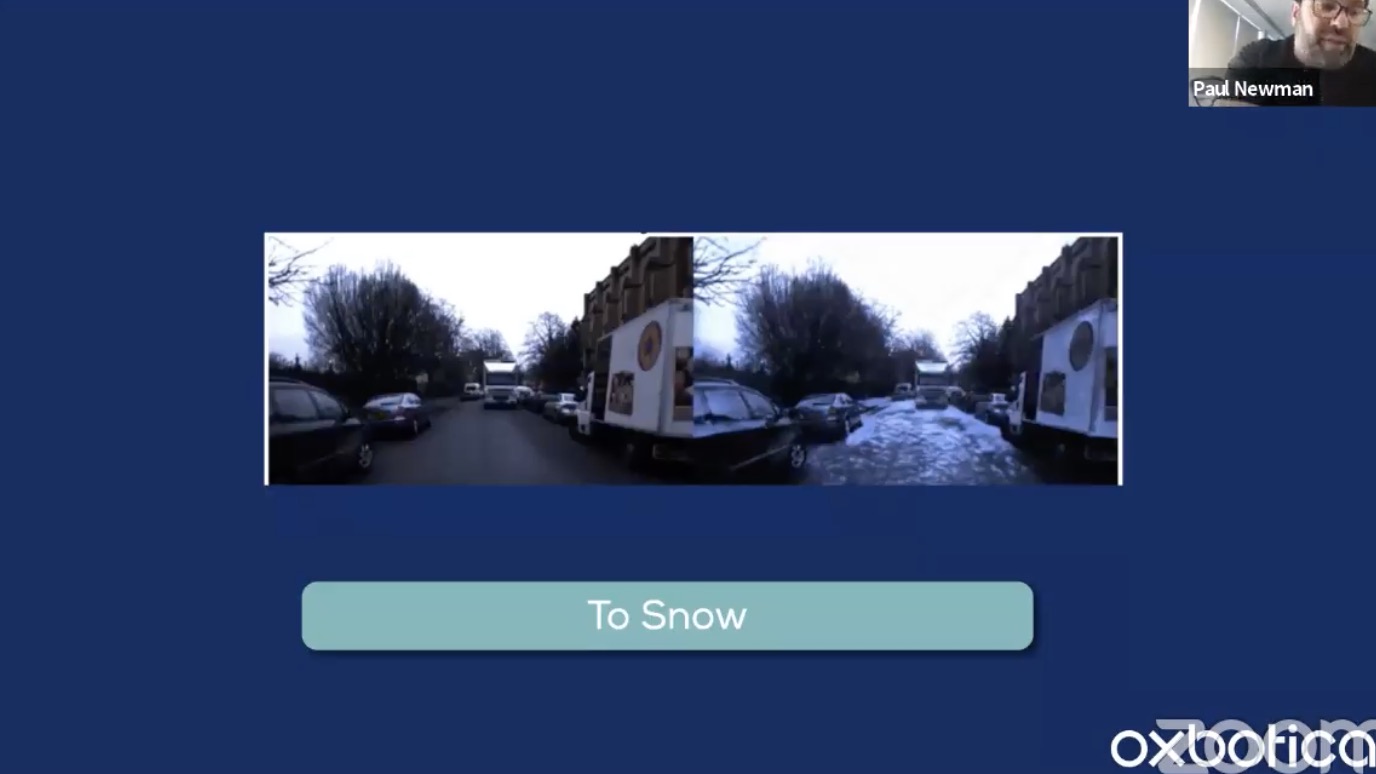

- Use semantic map to modulate what to manipulate
- class swapping (tree to and from building)
- cycleGAN: not necessarily easy to train, need to tune
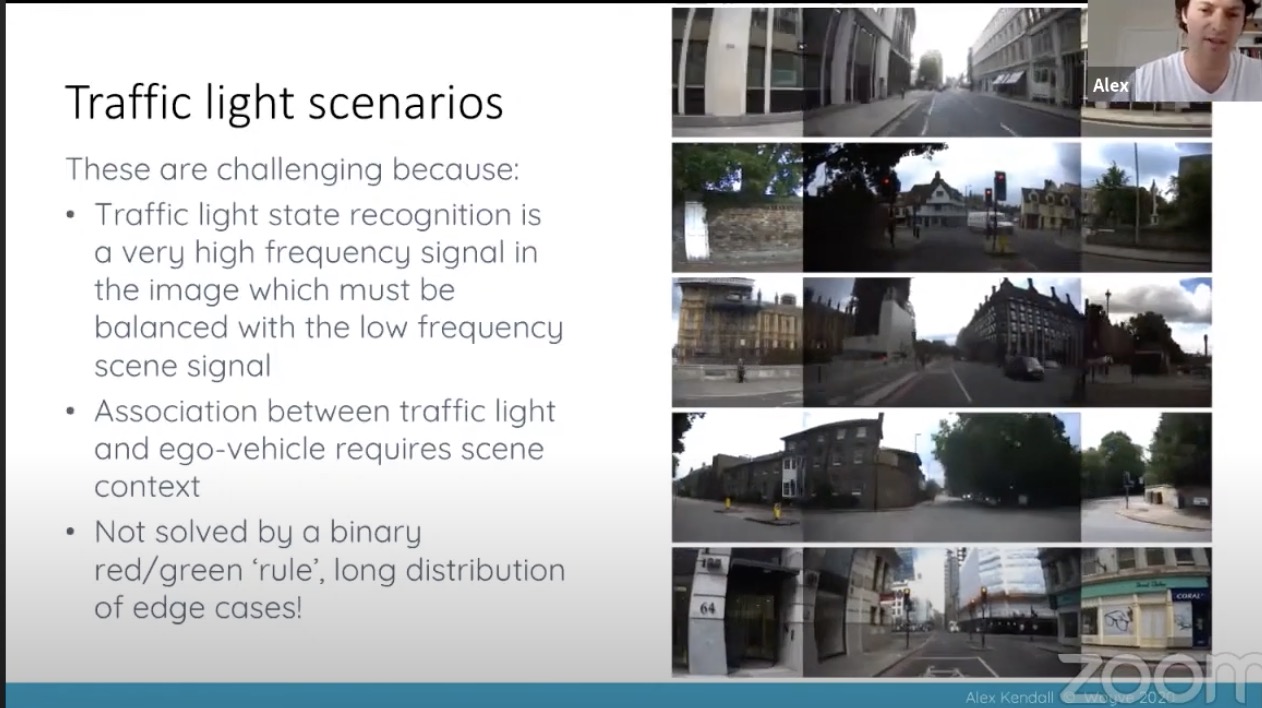
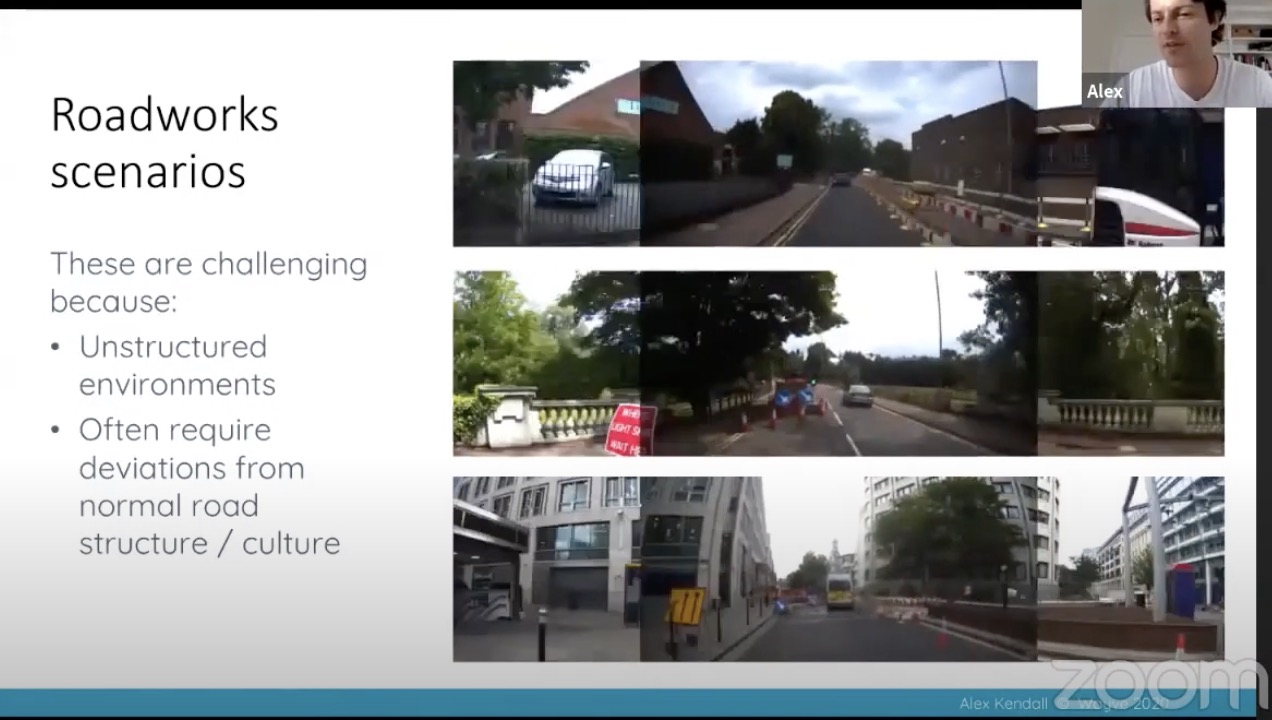
- Alex Kendall
- Data efficient learning system
- End to end, but that can be decoded to human interpretable tasks (optical flow, semantic segmentation, etc). These tasks are not necessarily the optimal tasks for AD
- Imitation learning and reinforcement learning
- traffic light and merging

- Kris Kitani
- standard 3DMOT
- sensor data –> detection –> association –> evaluation
- Kris Kitani is citing my graph from my blog on mono3DOD :)
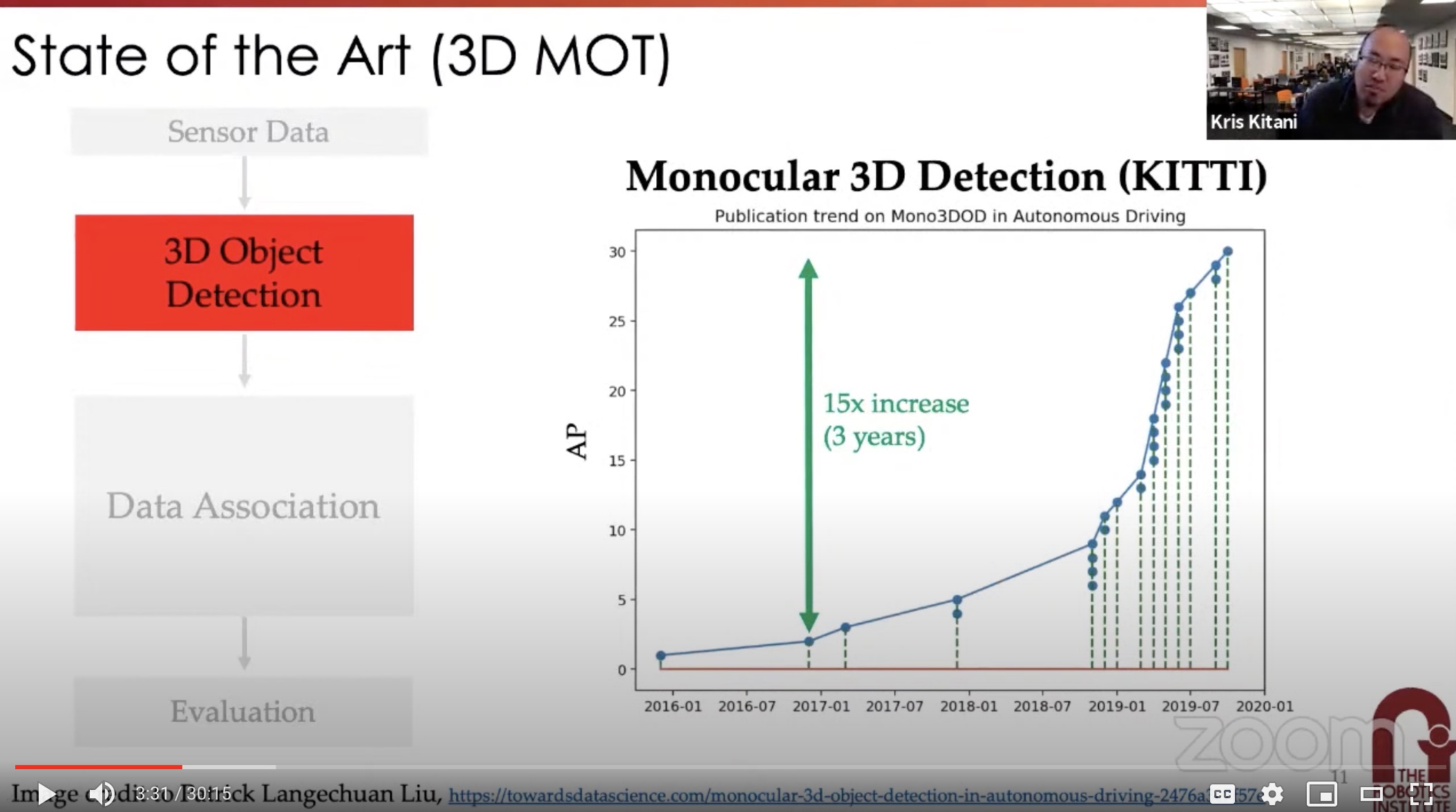
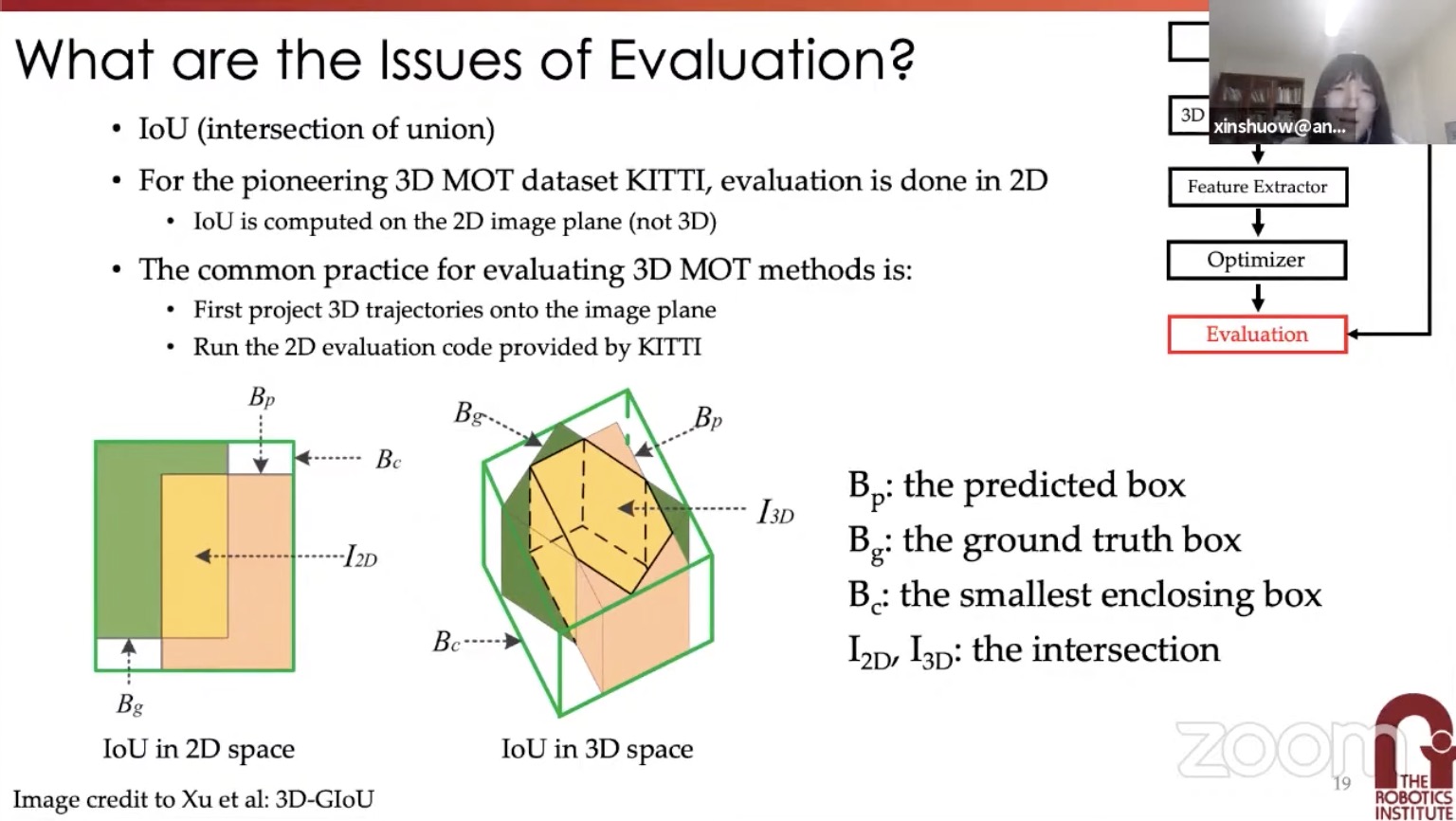
- 3DMOT is still evaluated with 2D methods. Need to extend to 3D metrics
- standard 3DMOT
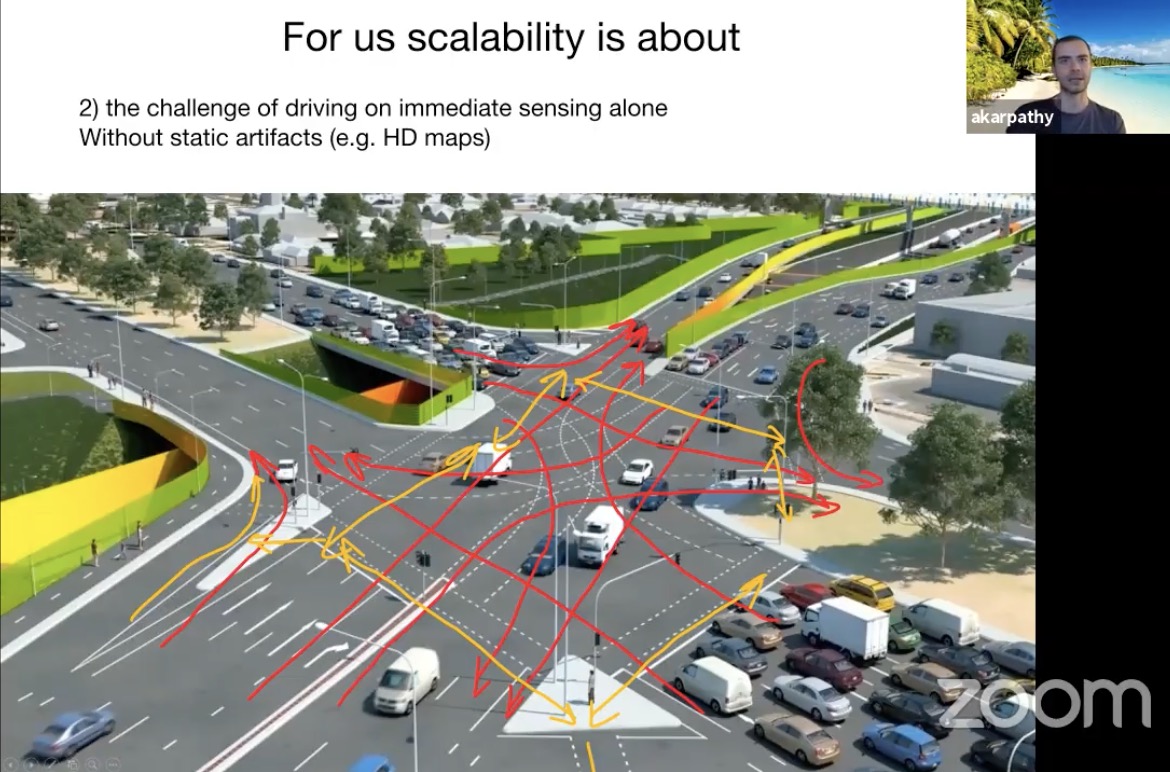
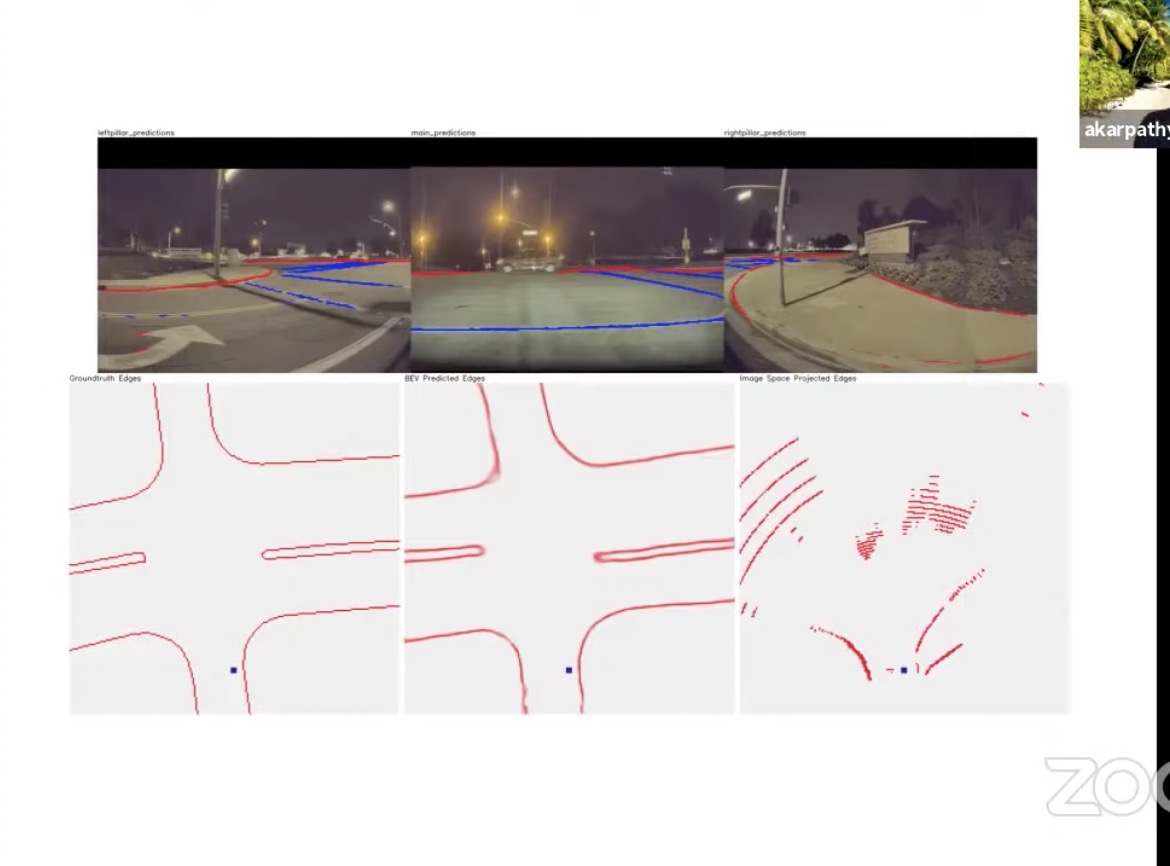
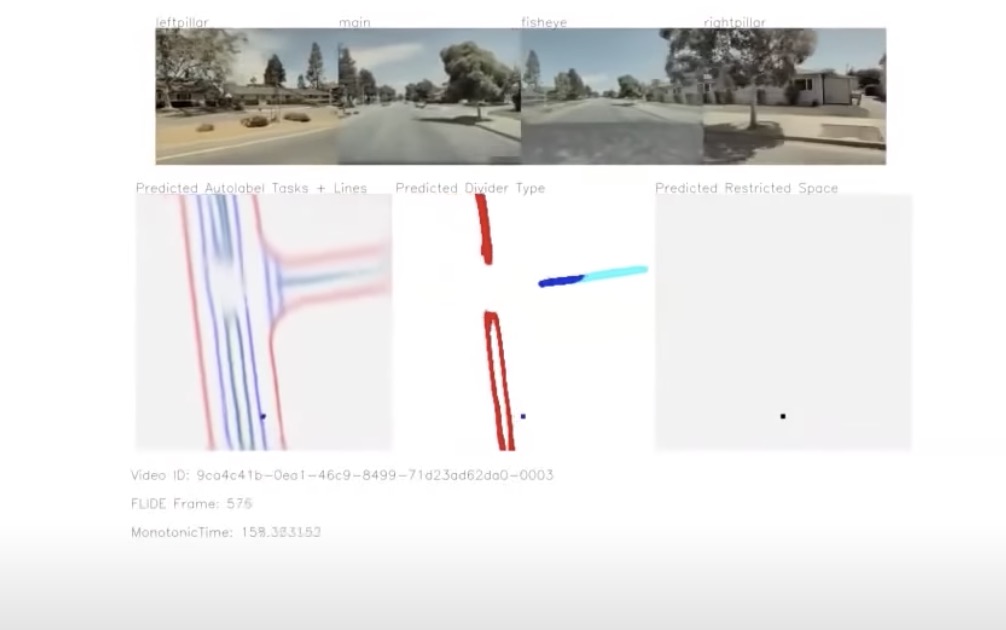
- Andrej Karpathy
- Tesla Autopilot
- Navigate on Autopilot
- Stops on Autopilot

- Vision based approach
- No lidar, no HD maps (self-built minimalistic HD maps)
- For Chinese market


- Driving with HD map can be a burden: need to maintain HD Maps
- Corner cases

- BEVNet
- Image stitching with neural network
- Orthographic feature transforms
-
Temporal smoothing
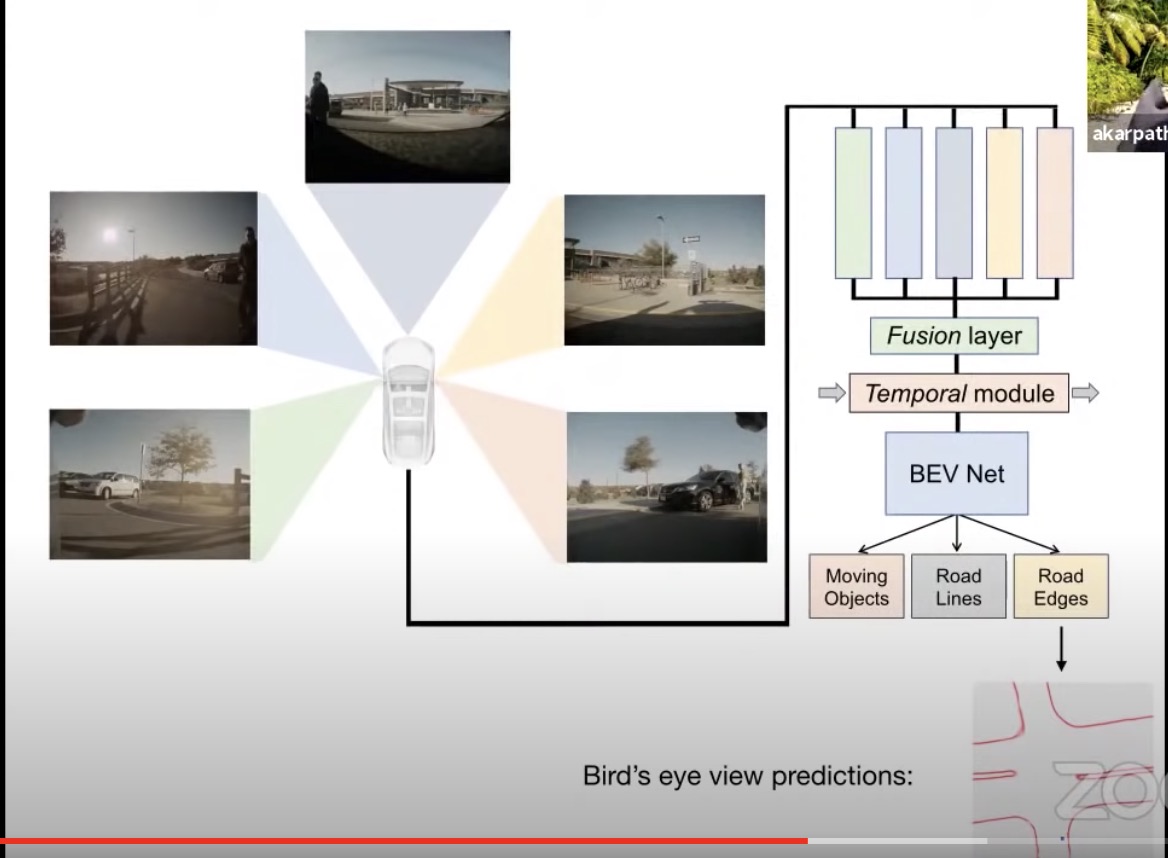
- Simply projecting out pixels looks terrible
- Uses main/fisheye, front left and front right
- Observe arbitrary geometry and try to predict the BEV
Waymo open dataset (WOD) challenge
- Lidar object detection
- data augmentation
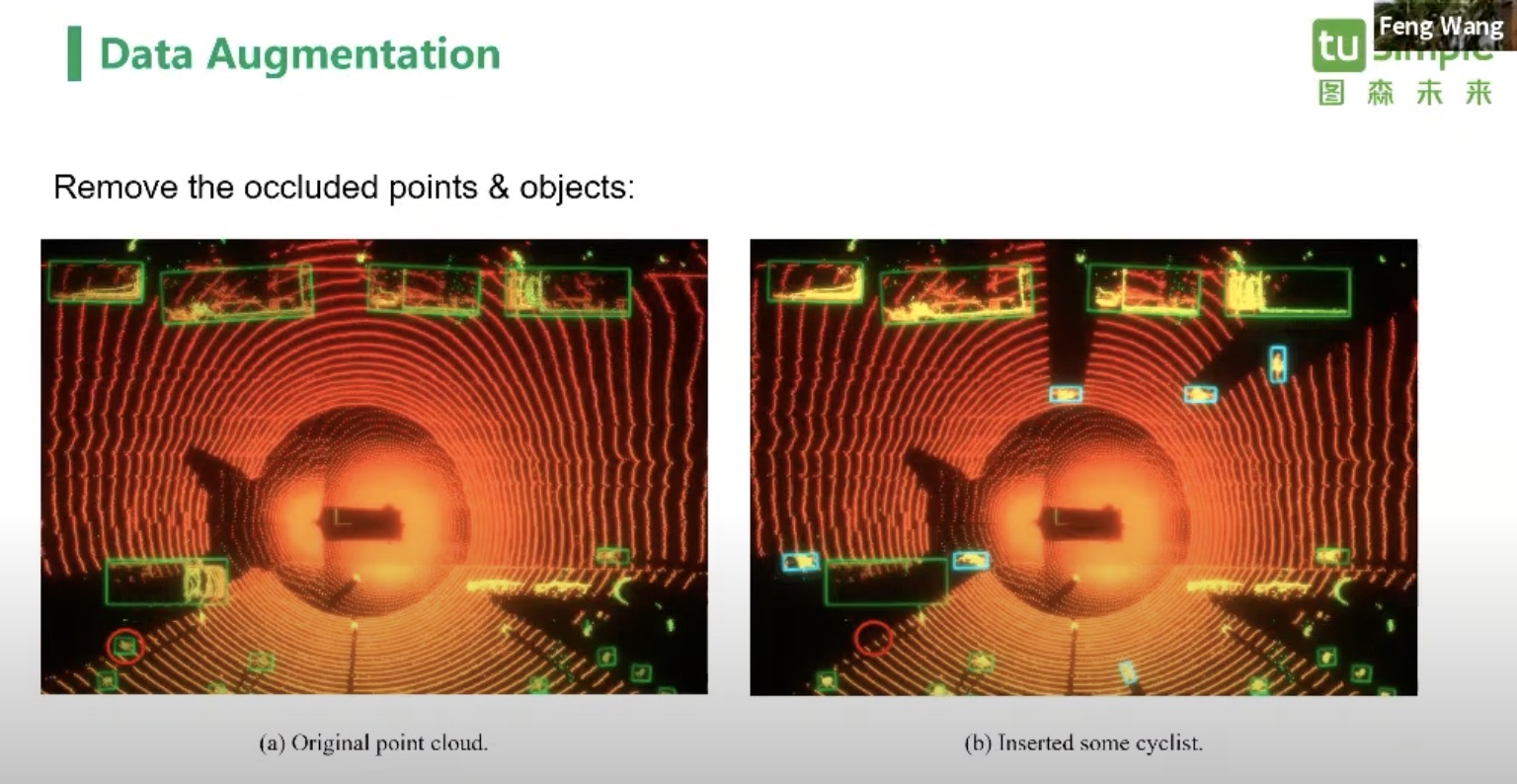
- data augmentation
Autonomous Driving Workshop
- Embodied perception in-the-wild
-
[A day in the life of a self-driving truck Andreas Wendel, CVPR 2020](https://www.youtube.com/watch?v=6l5fZRtUy9Y) - Large trucks are hard to handle even in lidar.
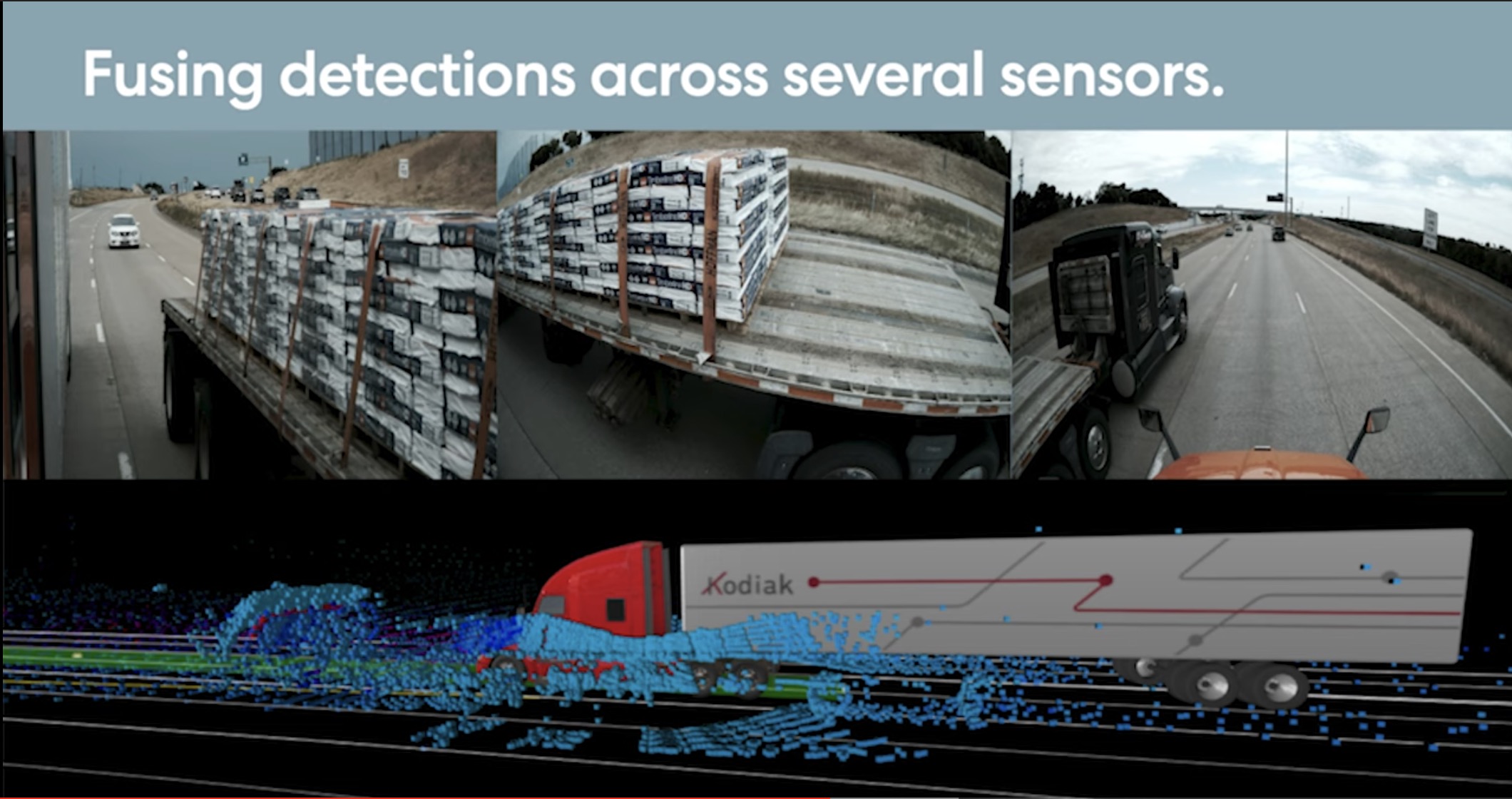
- More sensors means more opportunity to break down
- How to handle sensor failures in the field
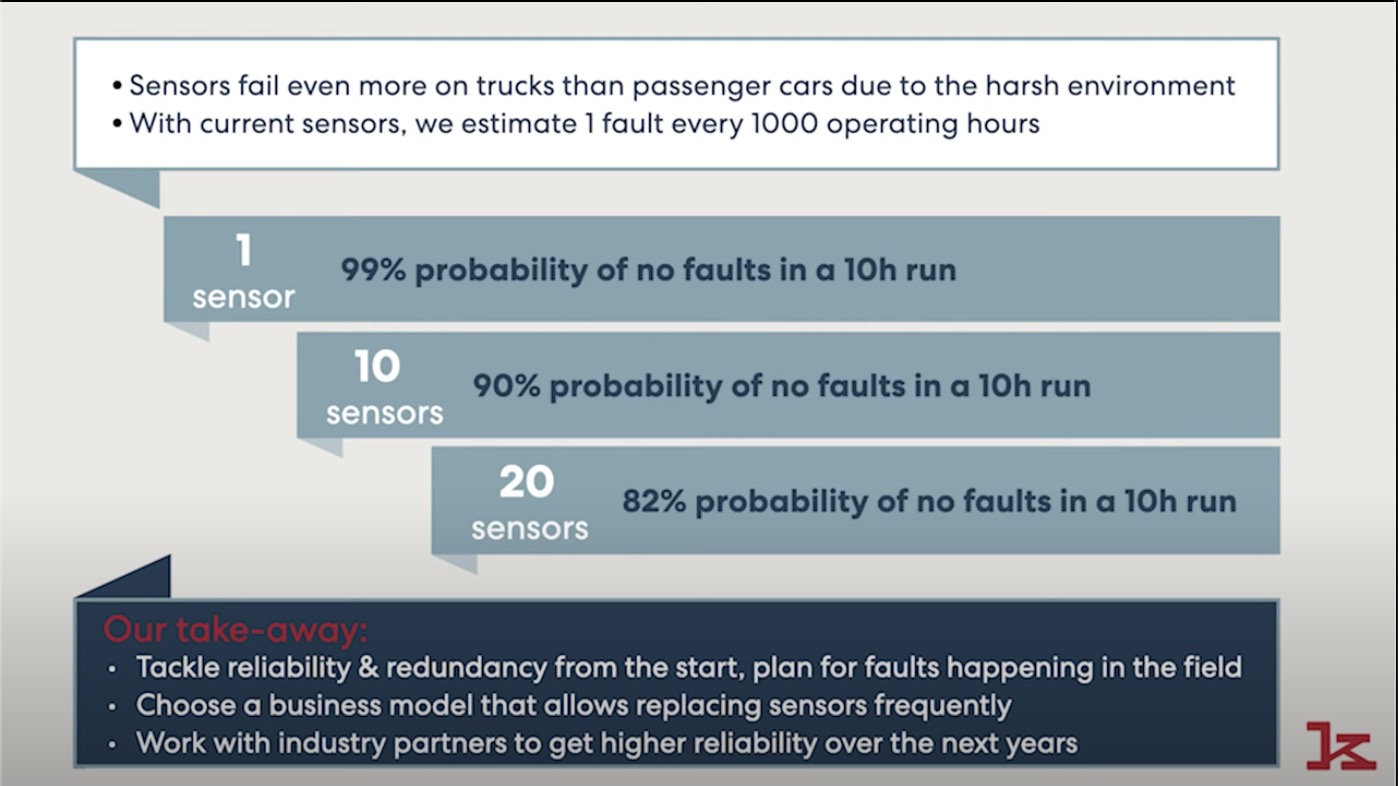
- How to handle sensor failures in the field
- Pothole avoidance on the highway
- Feels it the first time, and avoid its. Build a think map, instead of full blown HD Map.

- Feels it the first time, and avoid its. Build a think map, instead of full blown HD Map.
- Number of miles needed to build a safety cage depends on ODD (operational design domain)
- Lessons
- constrain the problem. Know when you step outside the bounds
- Get all parts good enough rather than perfect
- Be safe in all respects. It will make you go faster
- Large trucks are hard to handle even in lidar.