2019 CVPR Workshops
06/25/2019 (Saturday)
- ICML last day
- CARLA AD challenge. agents are dockerized and submitted to evaluation systems.
Aurora
- “fuel the rockers”: Building rockers vs ladders to the moon
- Learn from Demonstration, mimic human behavior (imitation learning)
- failure modes
- radar in a tunnel
- lidar in a snowstorm
- camera at dusk/night
- decision making: non-compliance
- Why other to use imitation learning when you have simulation/RL learning.
- Global exploration is extremely hard. Mimic good behaving drivers
- Statistical learning assumptions breaks in sequential setting (IID does not hold)
- no training data in recovery mode
- DAggr (Dataset Aggregation), learn by expert intervention
06/26/2019 (Sunday)
Tutorial: Learning Representations via Graph-structured Networks
- Learnable Spatial Propagation Networks - Sifei Liu and Ming-Hsuan Yang
- Note Good paper on depth propagation from Baidu
- Non-Local vs spatial propagation (less connections)
- 1D SPN (ECCZV2016), 2D SPN, unstructured SPN
- 1D: each row/column in image as a single
- FIR: conv, IIR: long range
- NOte: read up on this page later https://xiaolonw.github.io/graphnn/
Workshop on Autonomous Driving – Beyond Single-Frame Perception
- Lyft: Kumar hockey stick growth
- Incorporate knowledge into driving (static/dynamic objects)
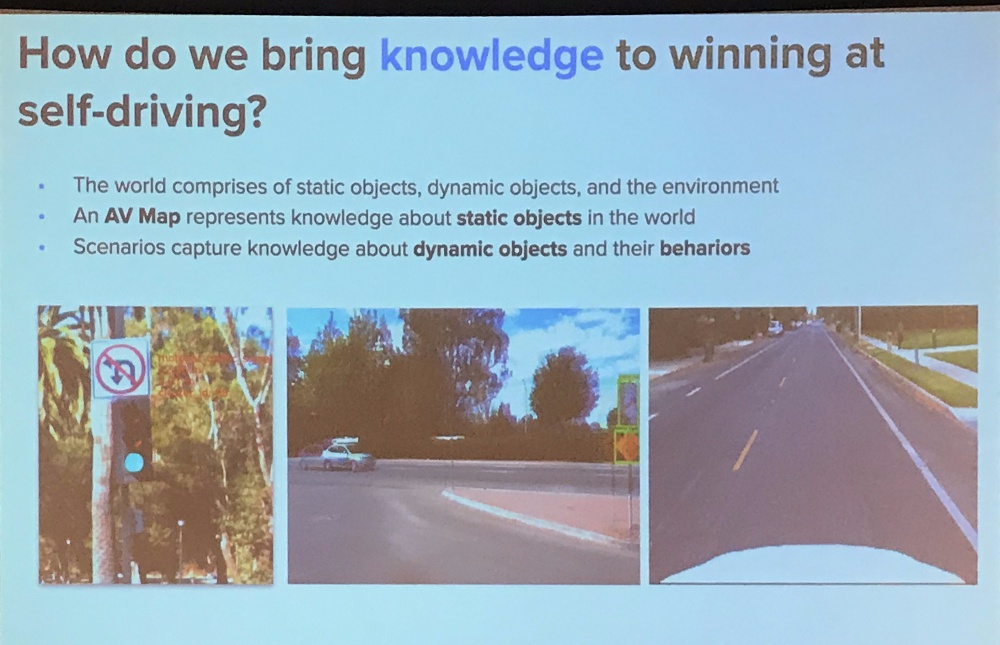
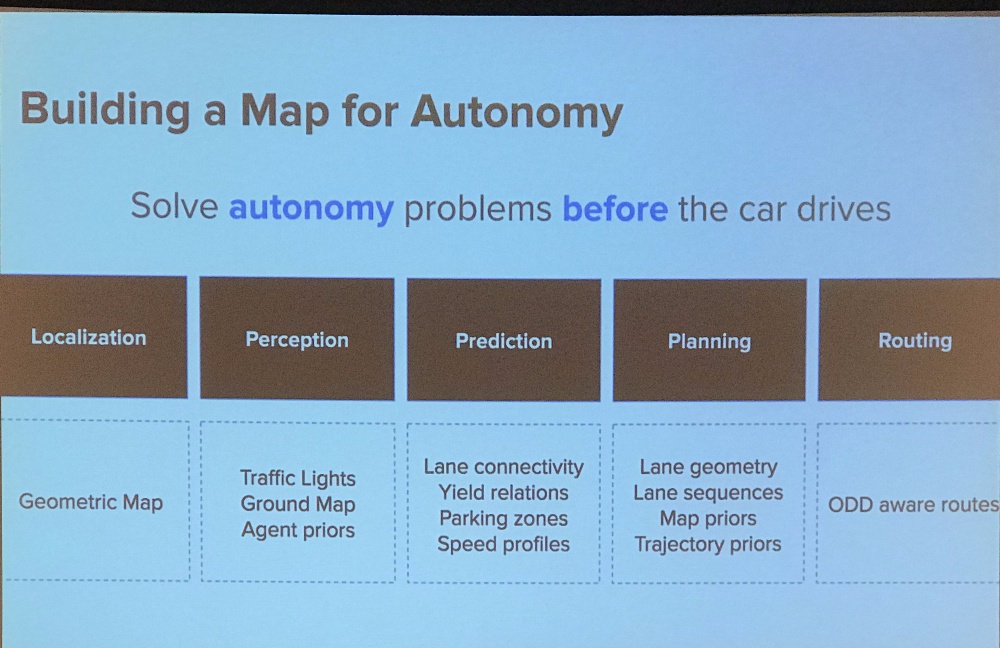
- Geometric Map (camera + lidar) vs Visual Geometric Map (SfM)
- Two 9’s accuracy with CV, but 4s’s with human curation
Workshop: CARLA
- Drago@Waymo
- What is the input representation for powering realistic agents?
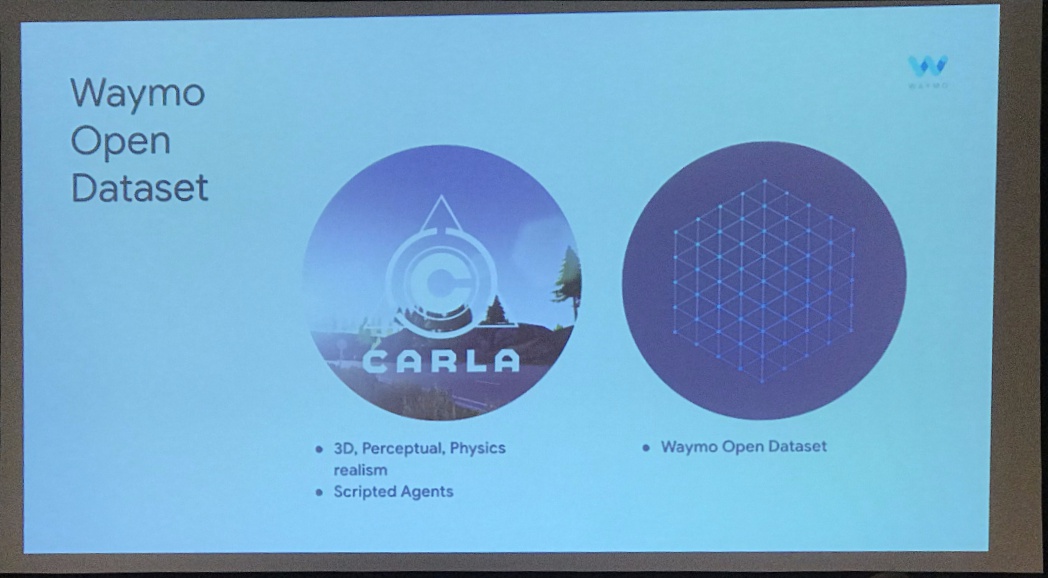
- realistic perception (CARLA)
- box world (ChauffeurNet)
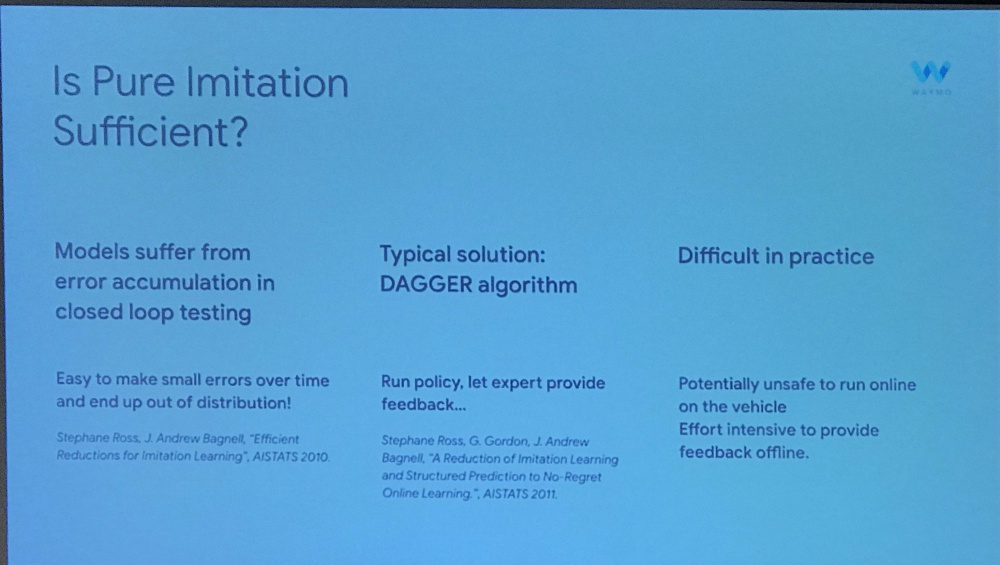
- Is pure imitation sufficient?
- DAGGER: not good in practice
- ChauffeurNet solution: synthesize perturbation,
- What is the metric for success?
- How to model non-average agent
- Note: RL may be good for ego car, but imitation is needed for agent modeling
- Google is going to open source a huge dataset in July
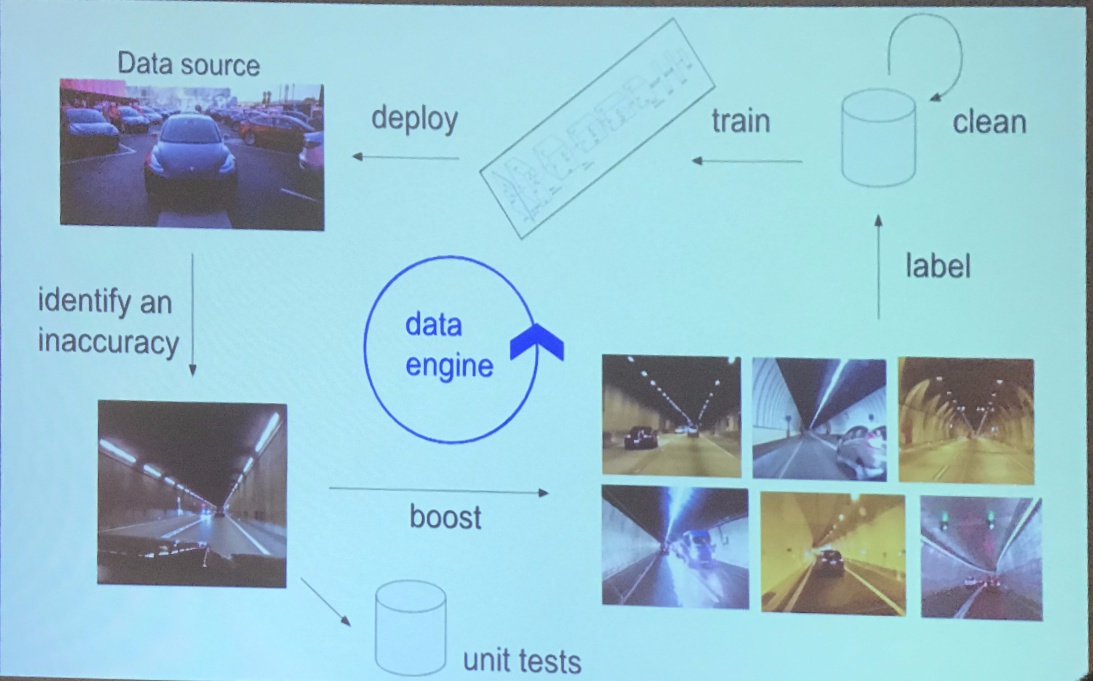
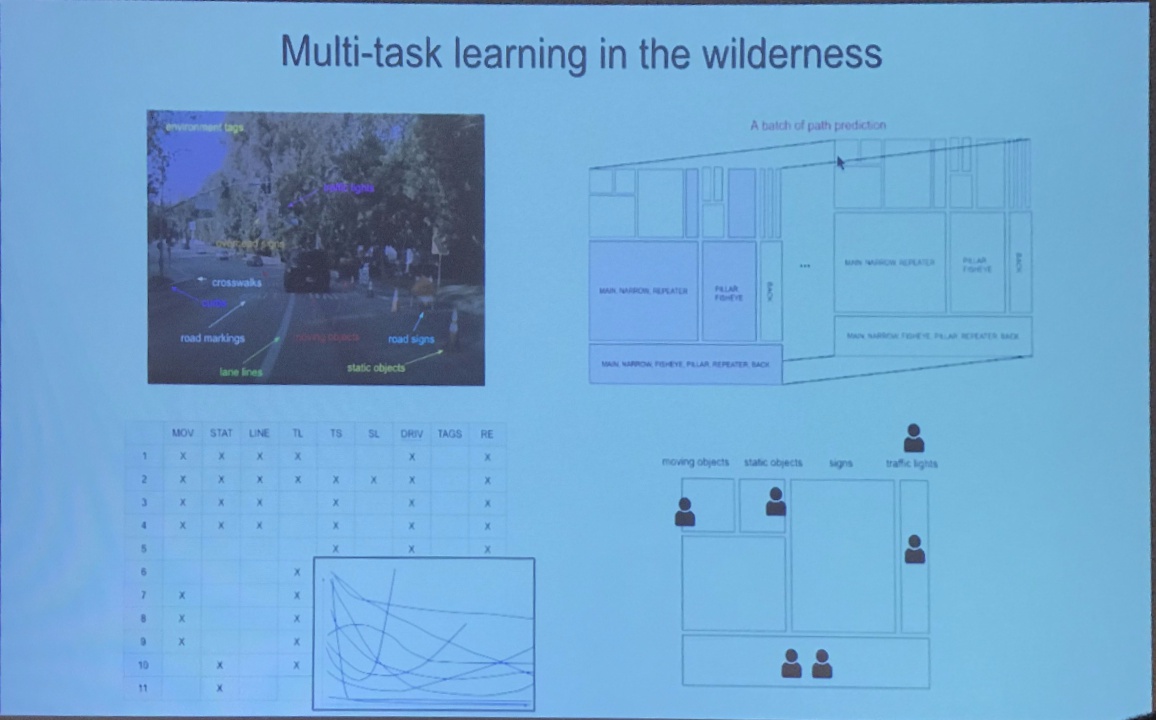
Andrej Karpathy
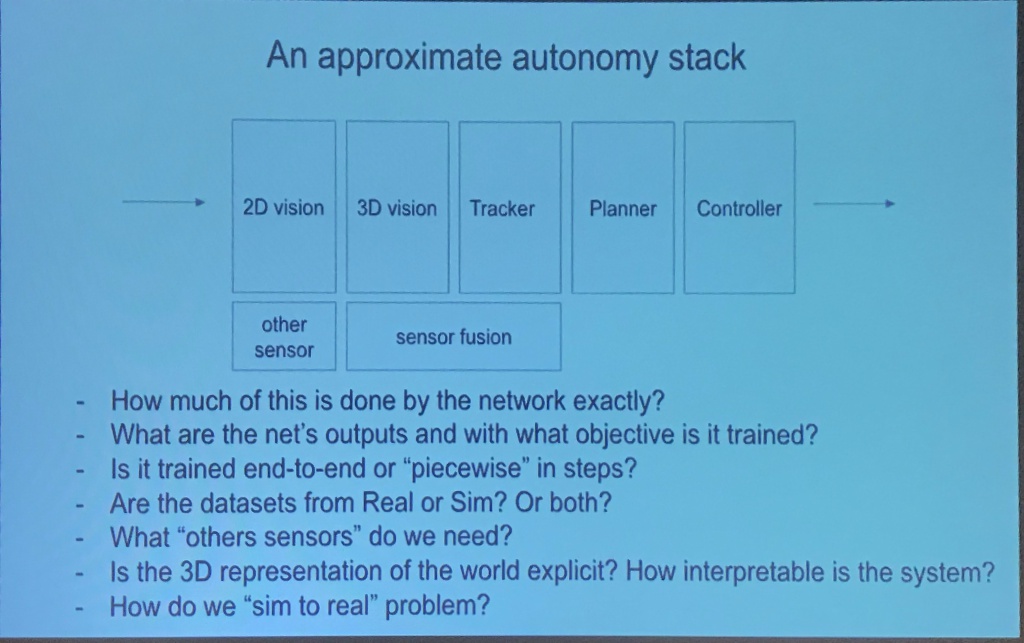
- Autonomous driving stack and AI
- Data collection pipeline
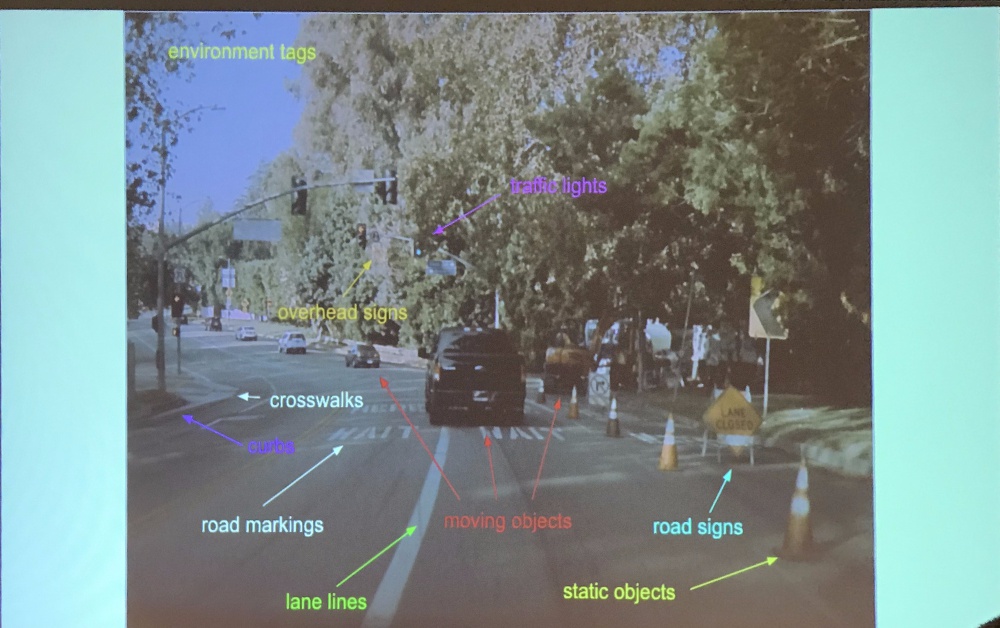
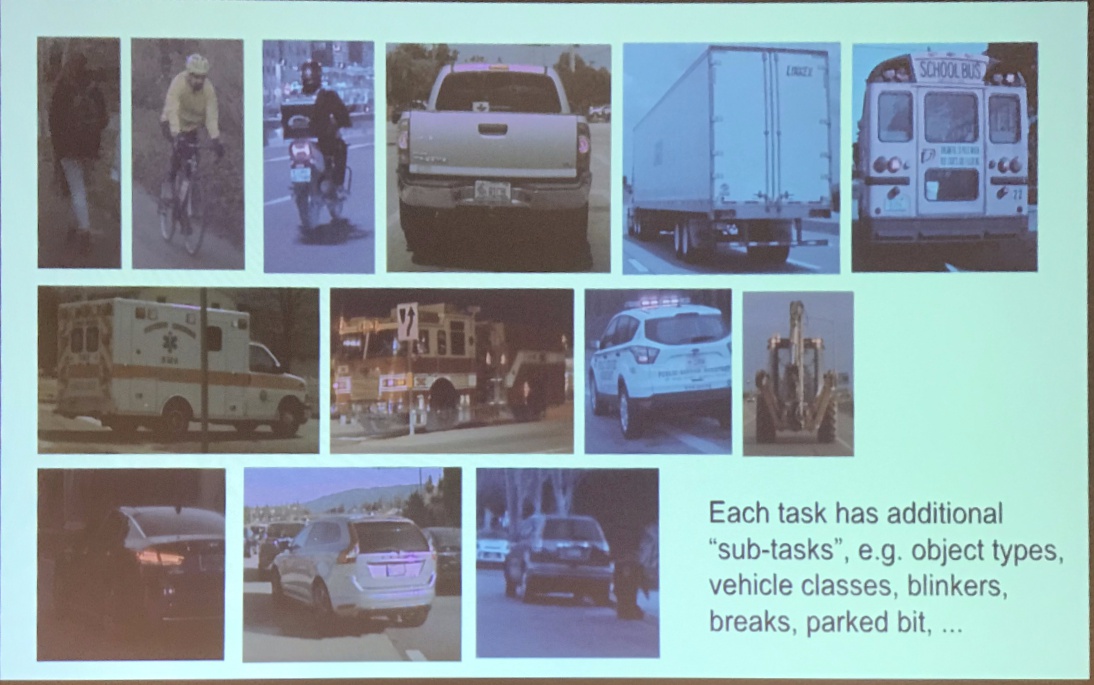
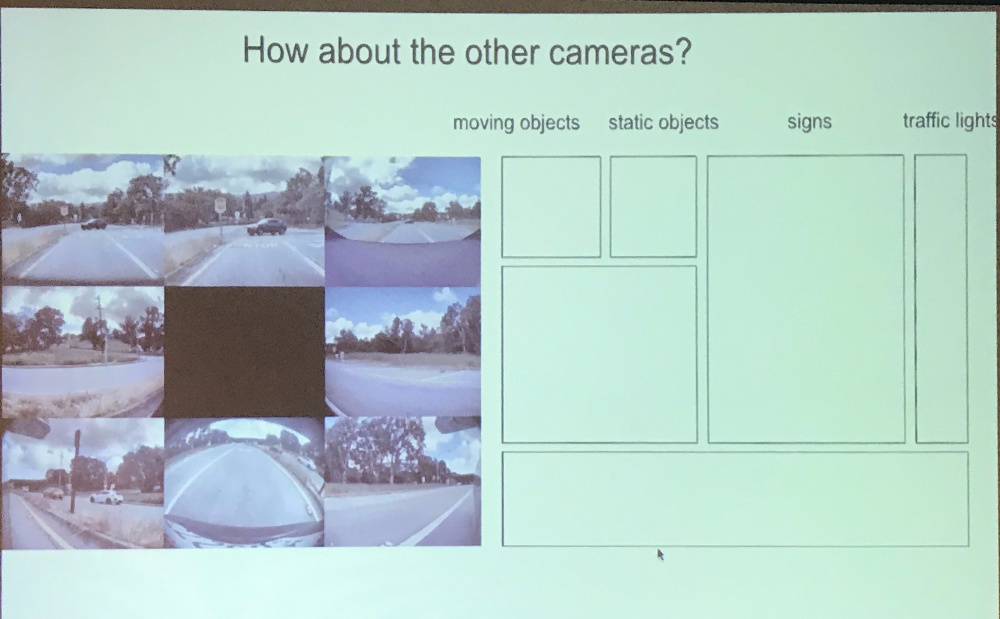
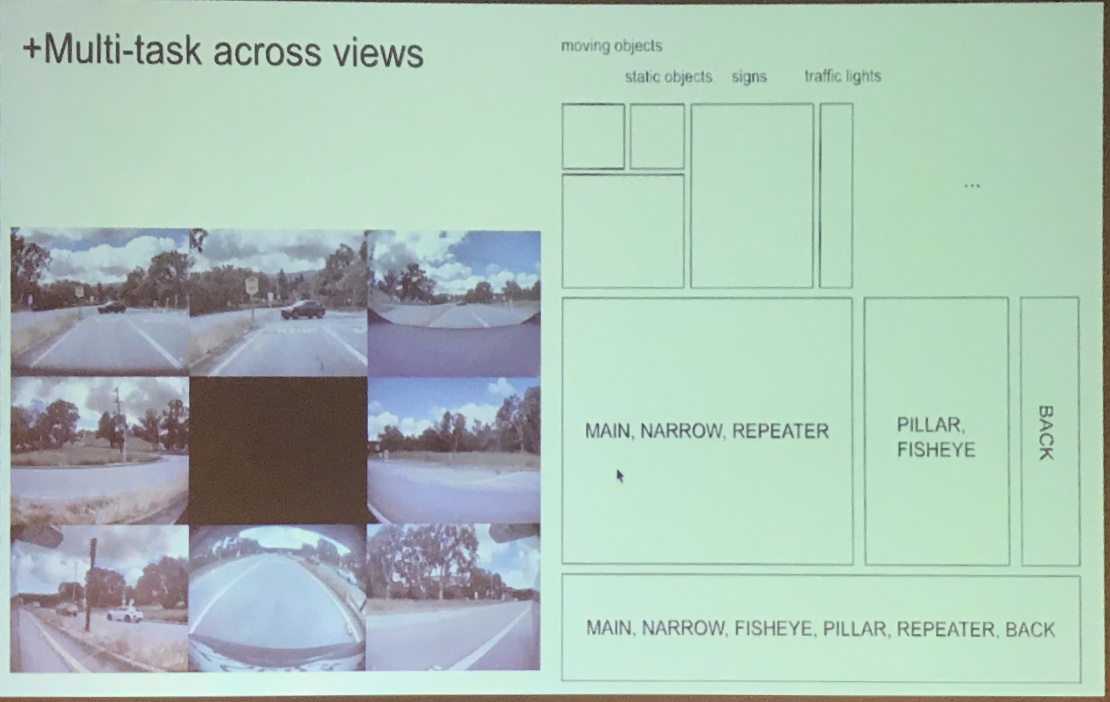
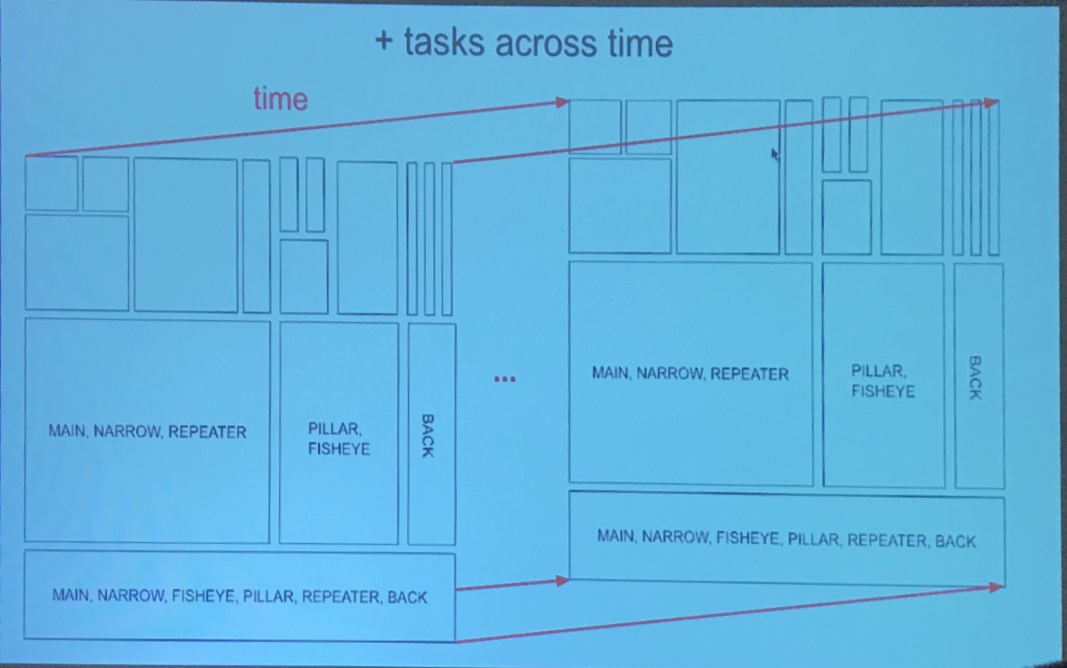
- 30-40 different tasks. each task has additonal sub-tasks.
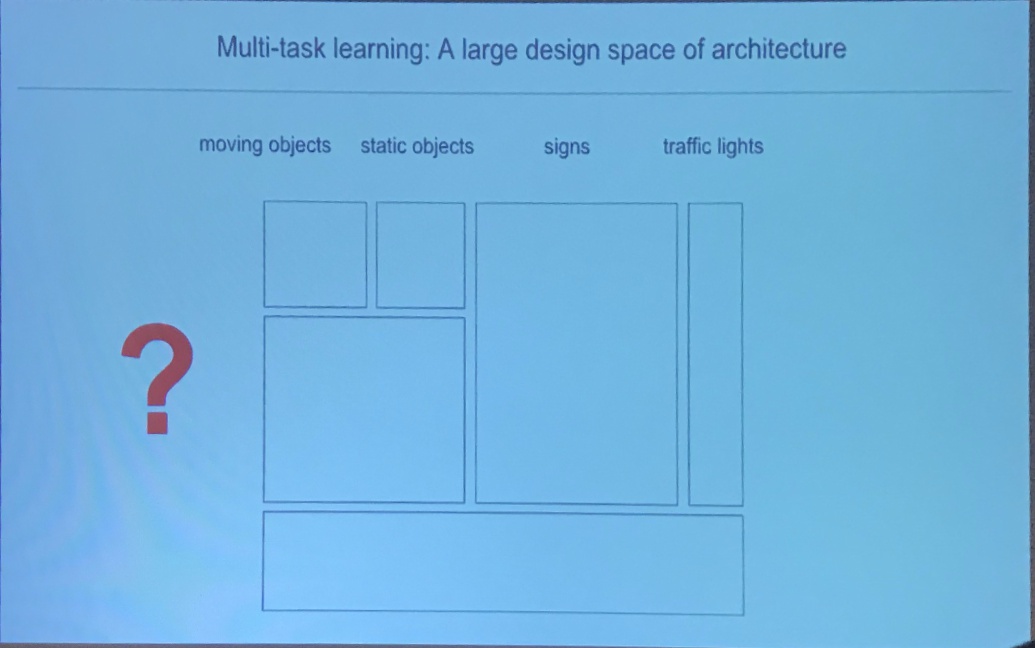
- Architecture considerations
- every single task have network: expenseive in inference, no feature sharing, potential overfitting, but decoupled functinality
- Single backbone with multiple head: cheaper in test, but fight for capacity, sometimes. fully coupled functionality.
- Partially shared backbone? backbone used during training but not in testing
- Temporal component: unrolled hybrid architecture
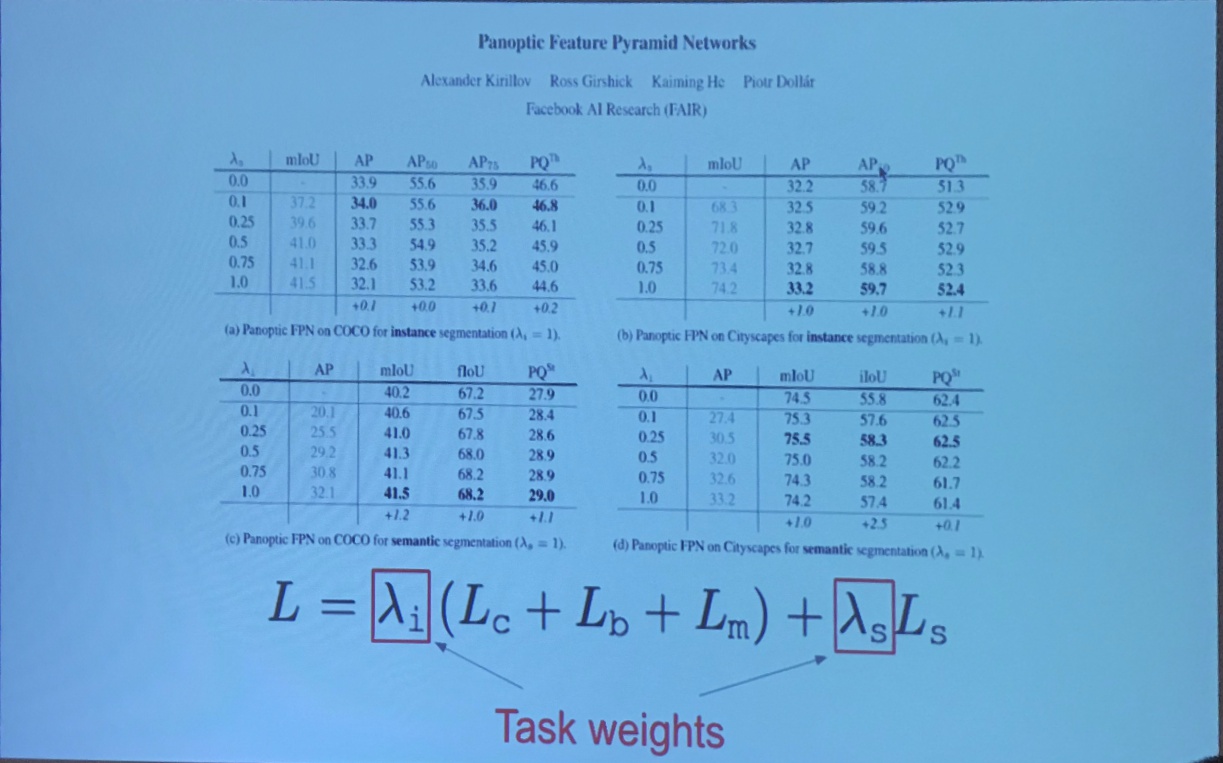
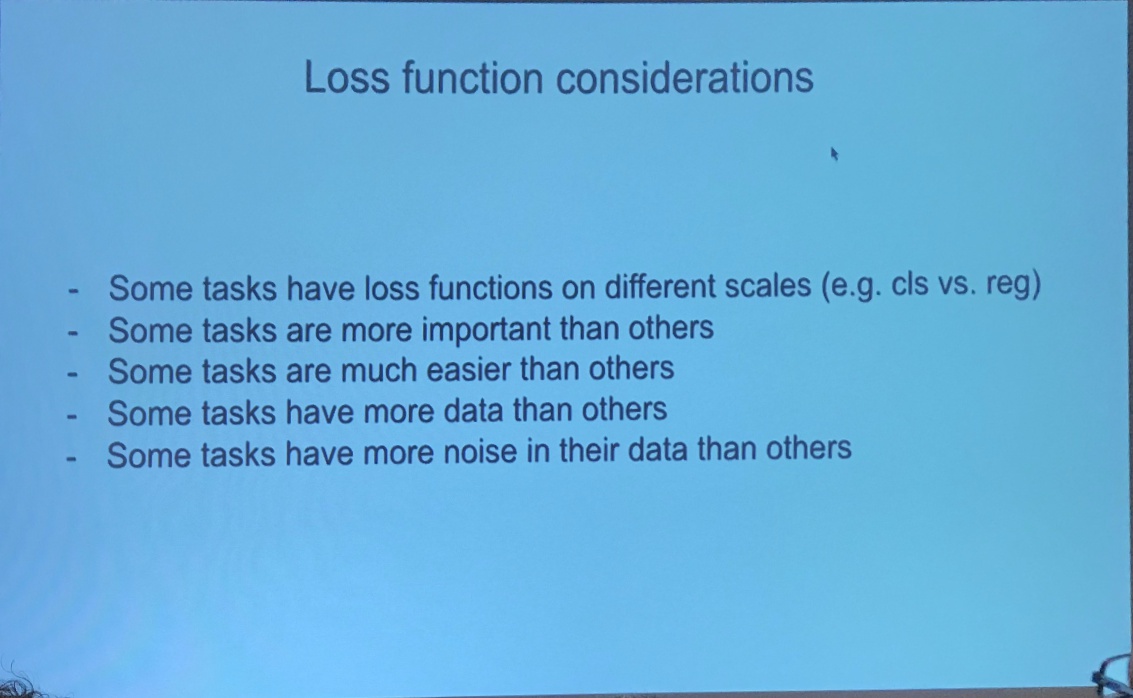
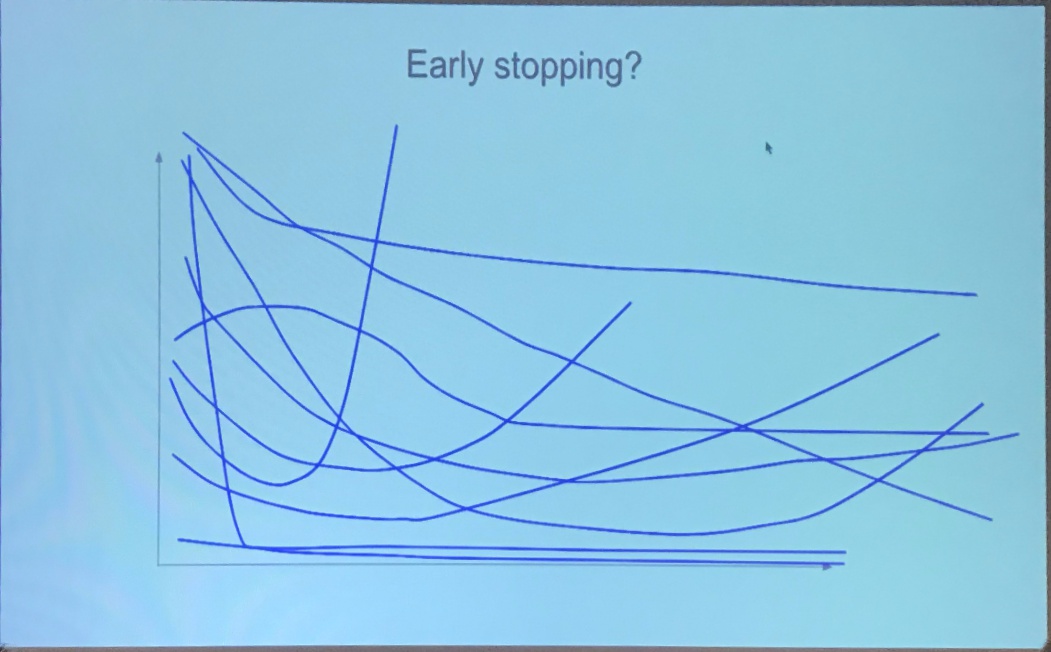
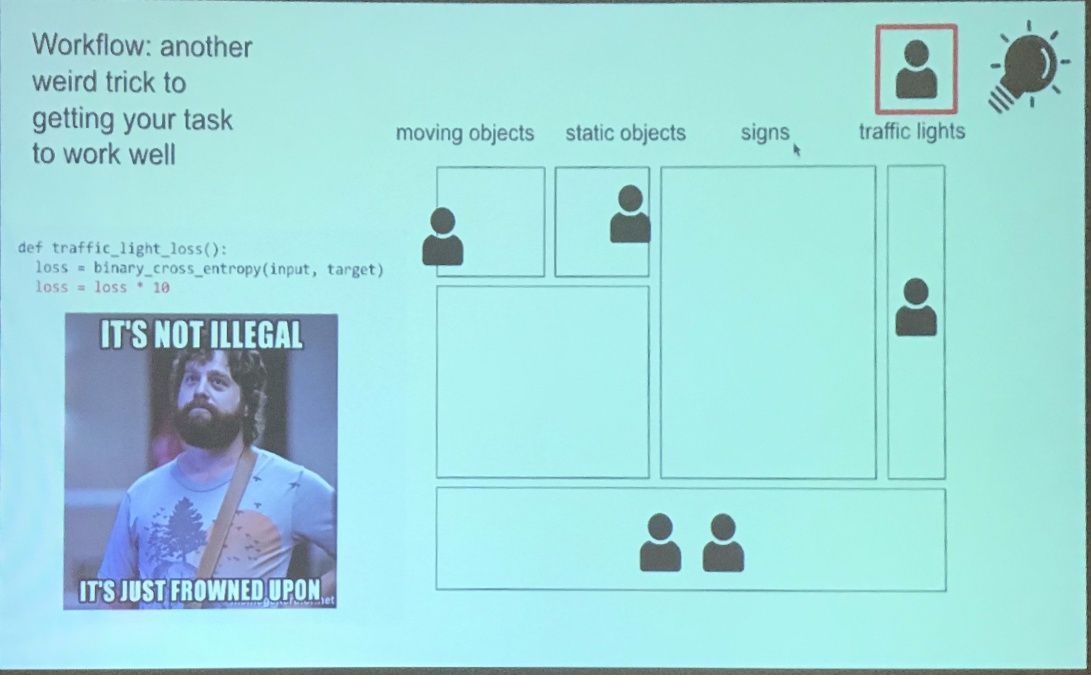
- Loss considerations
- more than 200 losses in total!
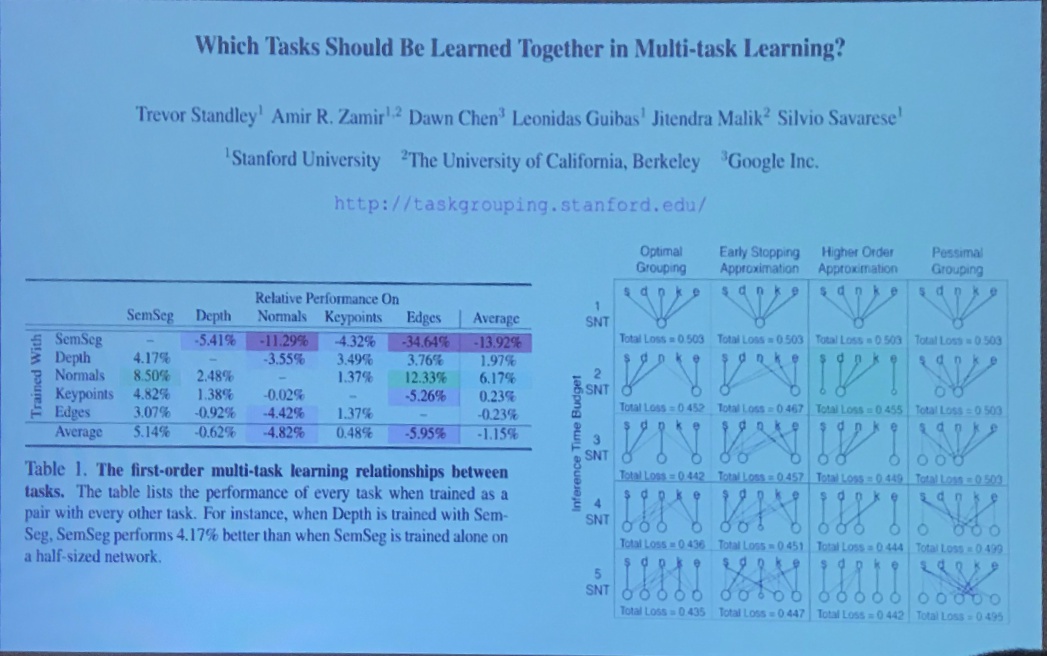
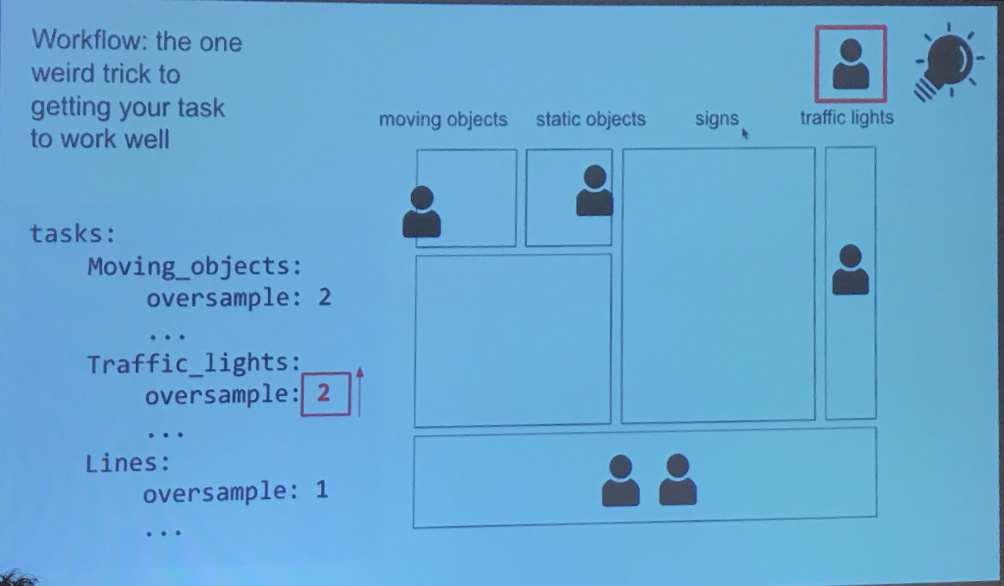
- How to do weighting factor $\lambda$ saerch?
- Tasks have different scale, importance, difficulty, have more data, more noise, etc…
- Single task: early stopping. But how about multiple loss?
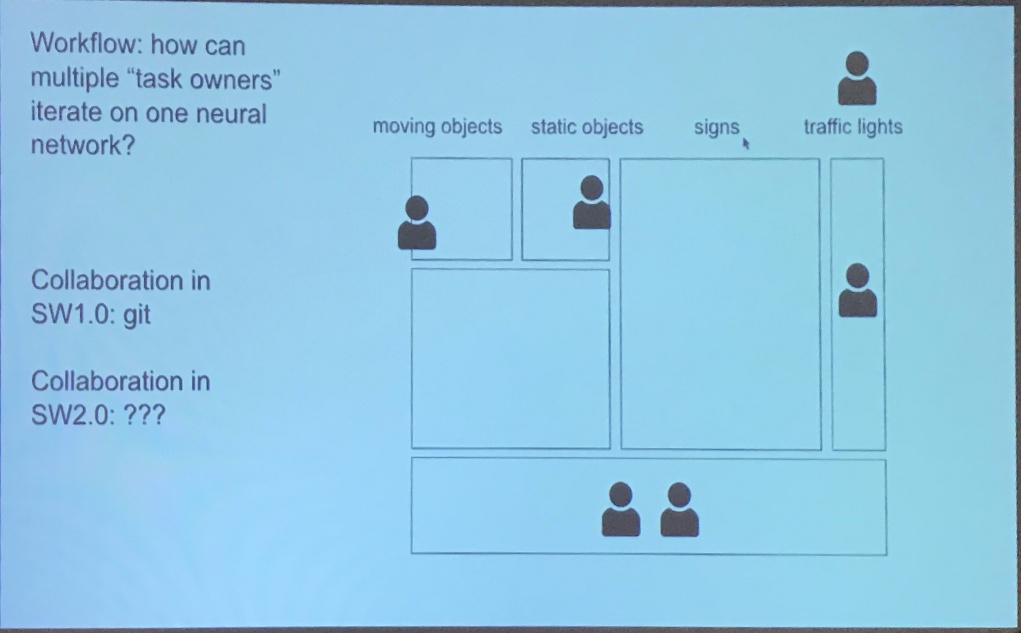
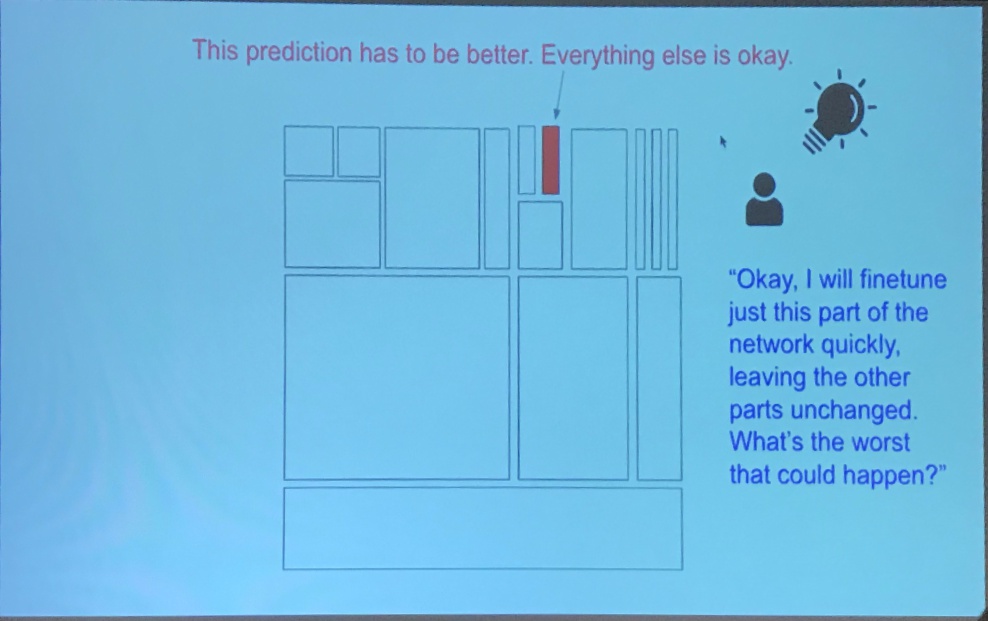
- Team assignment
- How can multiple task owners iterate on one neural network?
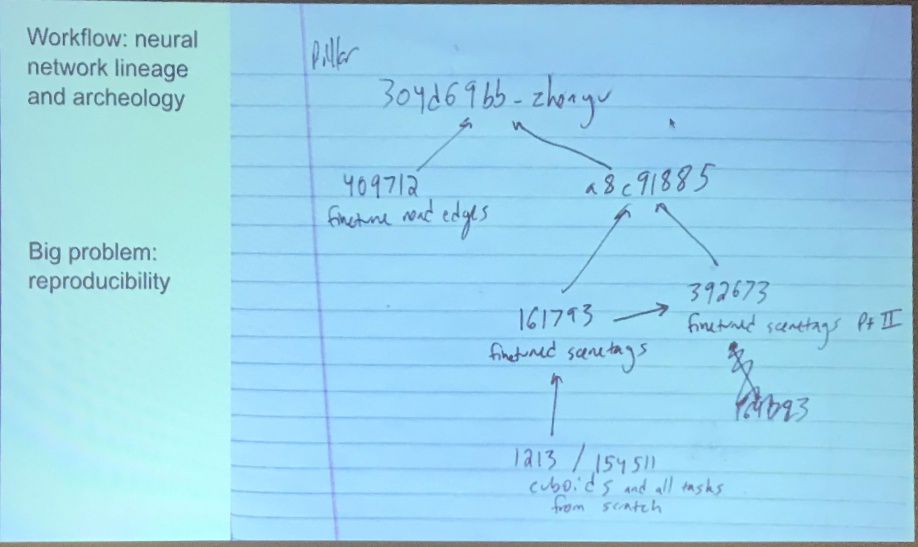
- big problem: reproducibility: track workflow
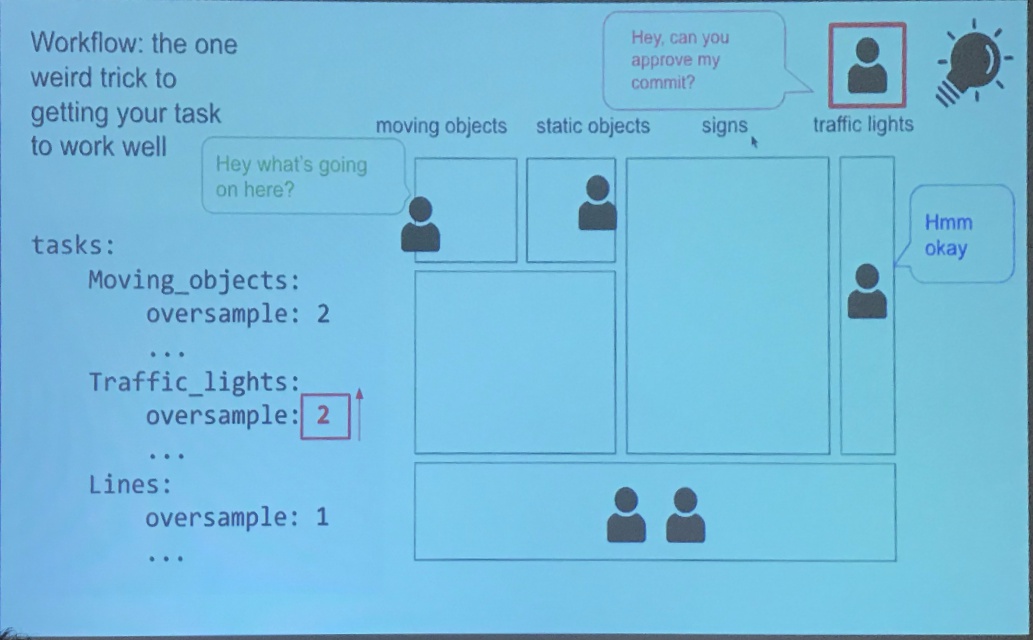
- Make each increment buildable, use distributed training for fast testing
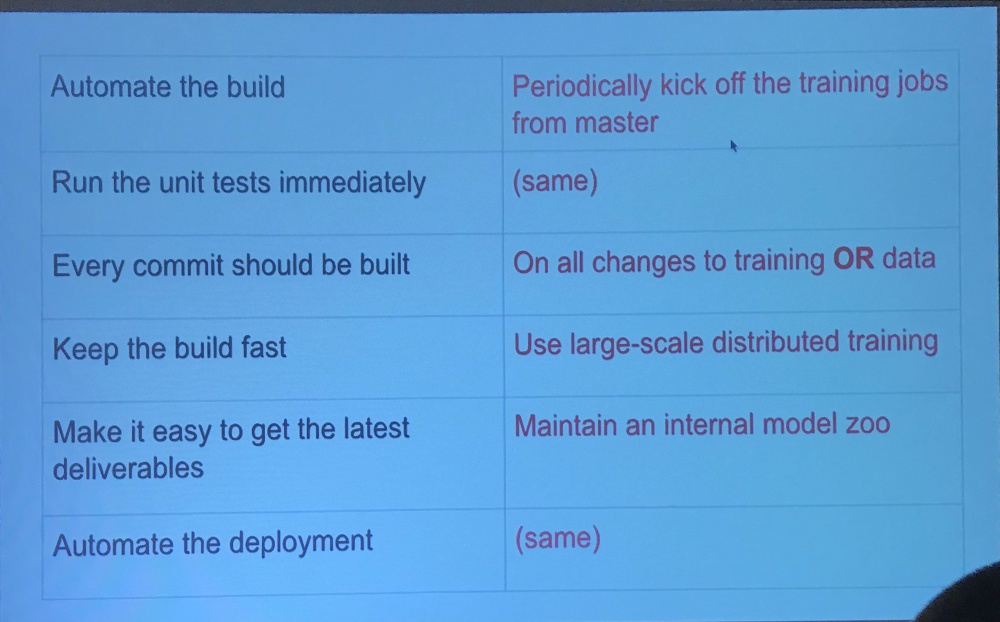
- Note: You can only develop as fast as you can evaluate. The team can only move as fast as your evaluation allows. So it is critical to have a fast evaluation pipeline.
- Jitter over time indicate uncertainty implicitly. Use uncertainty, but not exactly Bayesian networks, but cheap approximation to that.
- Oversample “boat on trailer”
Hearsay at Poster section
- Dilated point convolution, sparse sample nearest neighors
- Domain adaptation: use video, train on those frames that it does not work well.
- Generic 3D object proposal generation: run 2D mask rcnn at low threshold, then use consistency to find the objects.
Video Classification and Detection
- Inflating filters in the temporal domain
- slowFast network
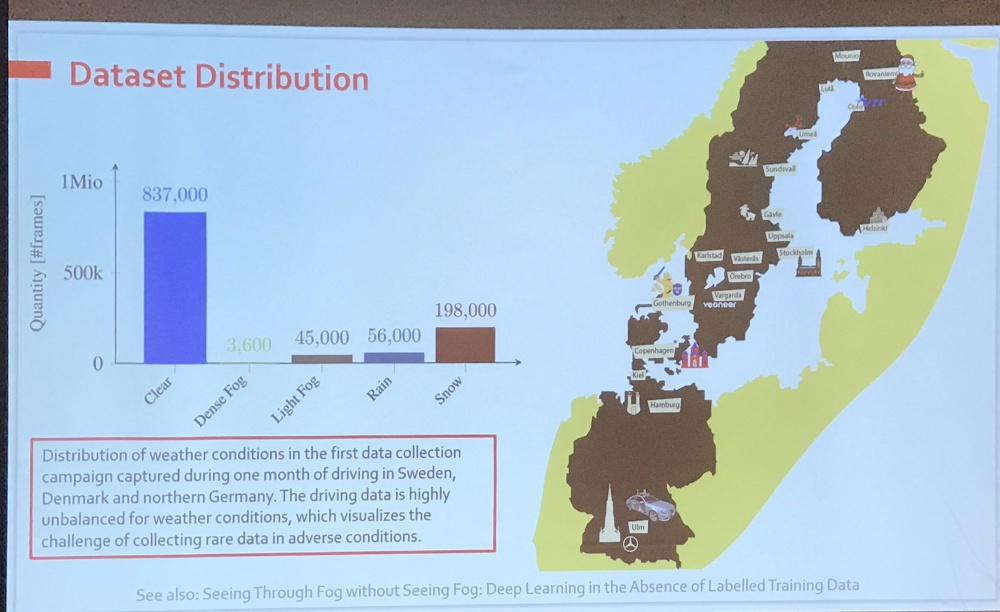
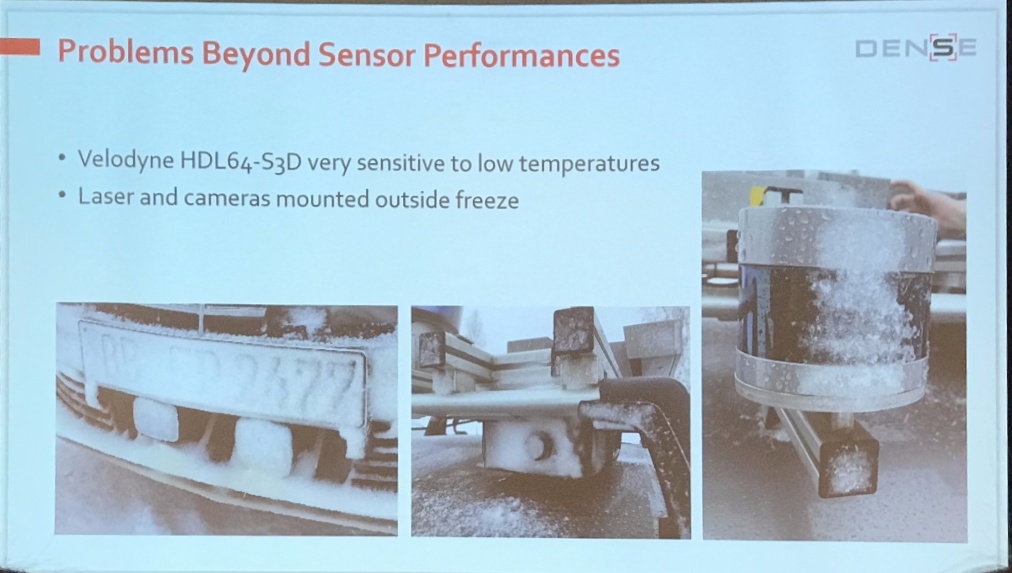
Workshop: Vision for All Seasons: Bad Weather and Nighttime
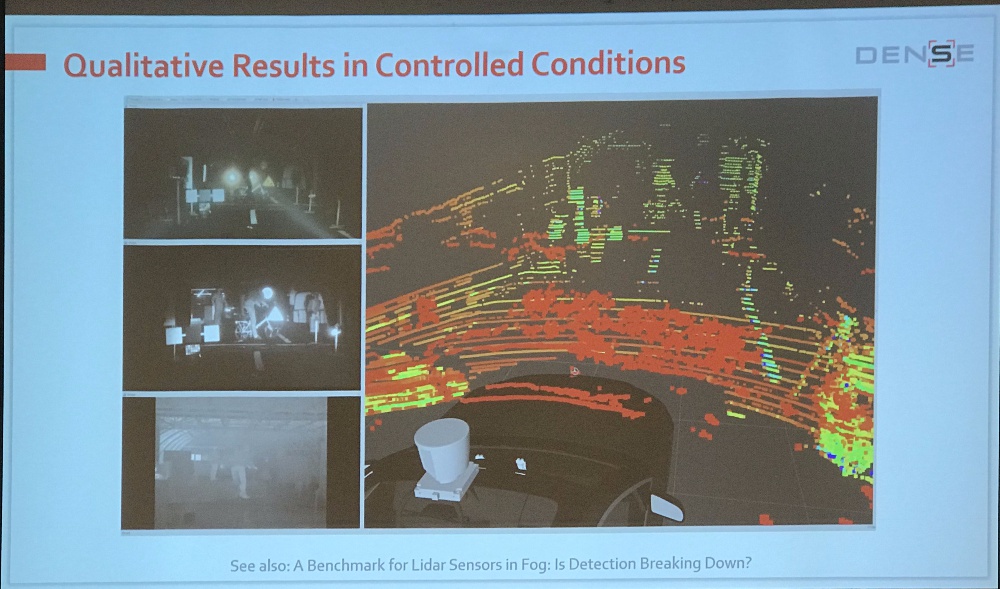
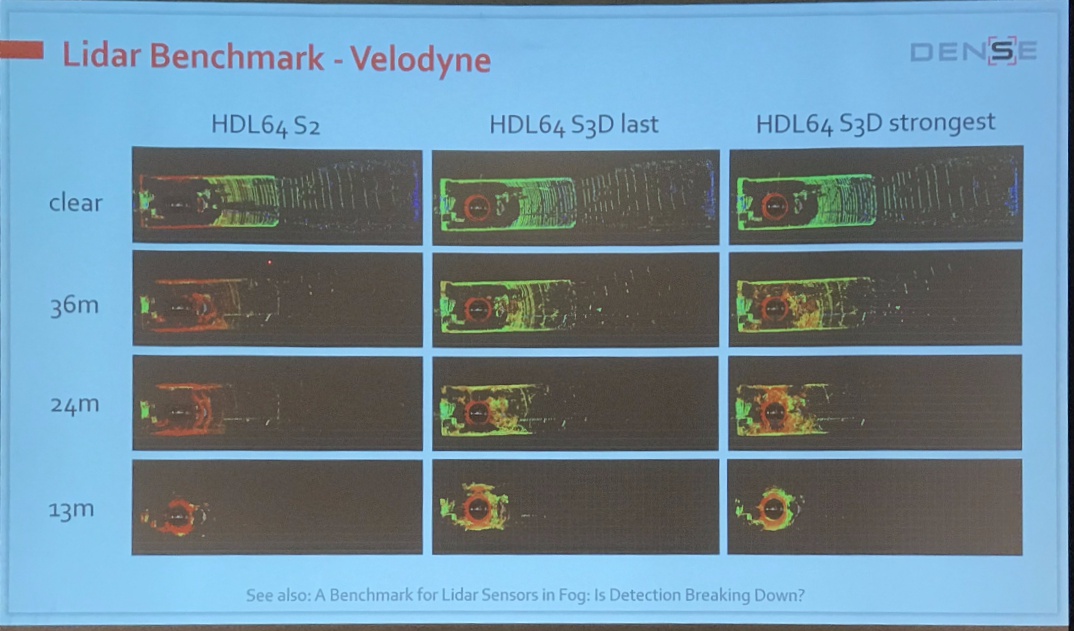
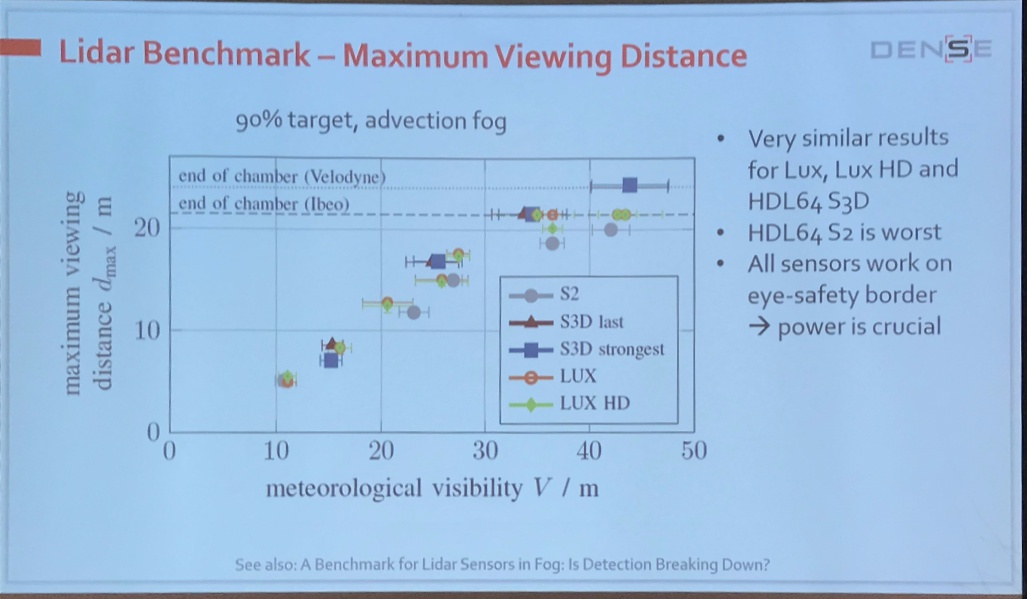
How to evaluate each sensor degrades with increasingly adverse weather
- DENSE project
- From Mario Bijelic Daimler AG
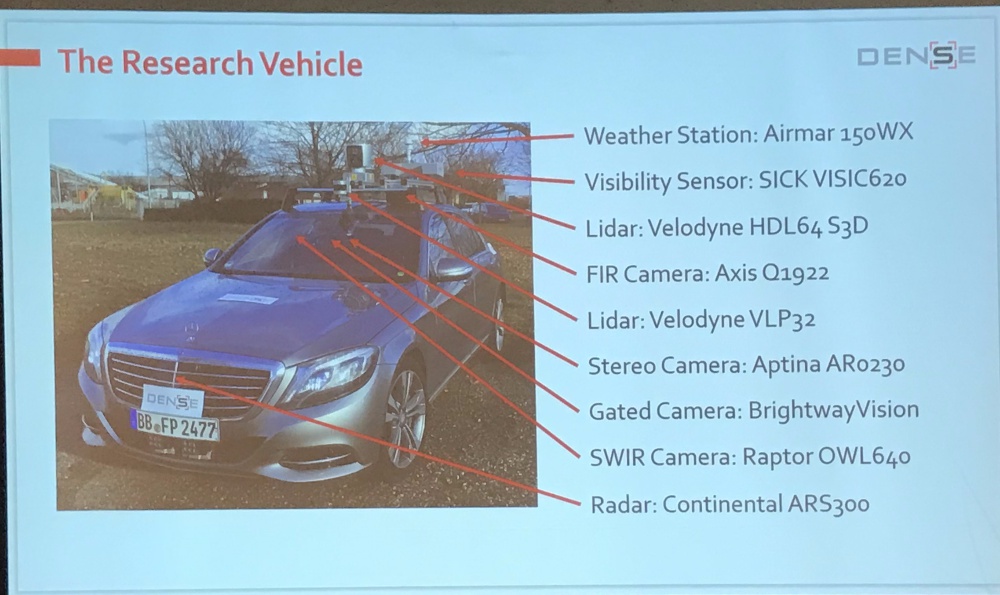
- gated imager: only from a certain depth
- snowdust disturbs lidar a lot. Can simulate fog in clear data.
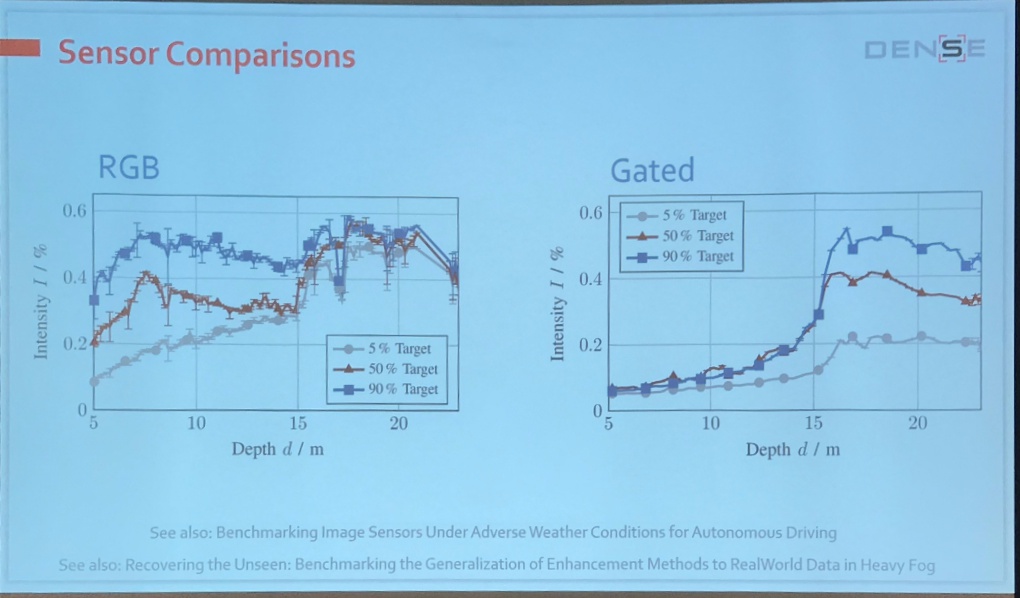
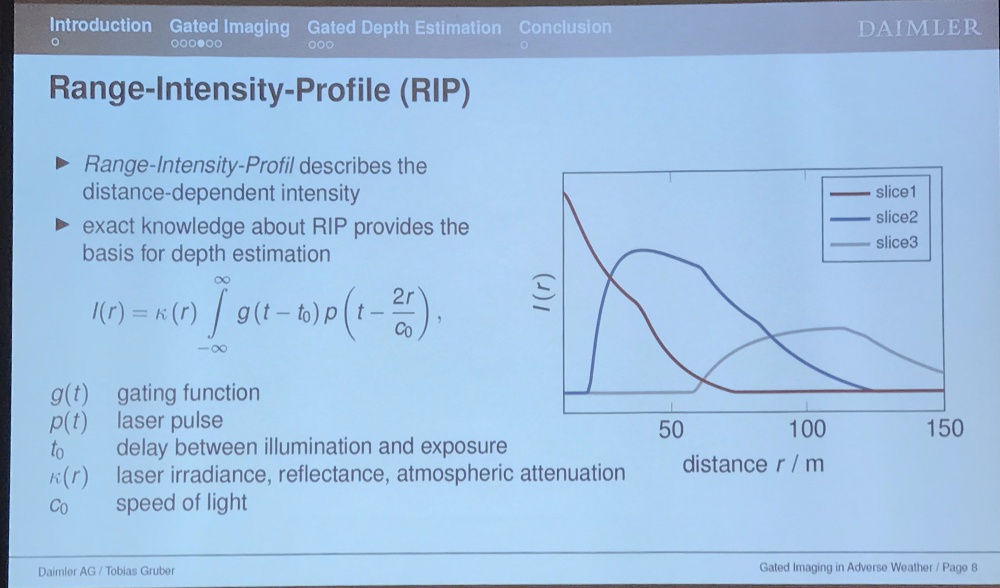
Gated imaging in adverse weather
- only collect relfected signal in a certain distance range
- good for condition such as fog (rid of back scatter from other depth slices) or night
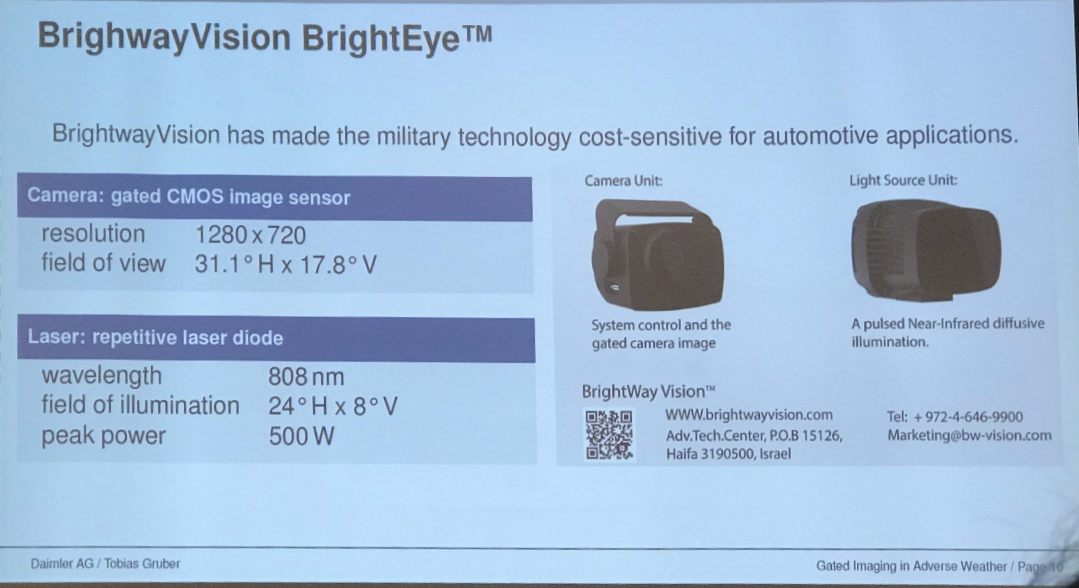
- active illumination with: NIR (no color)
- frames per second? –> 120 fps, little motion blur
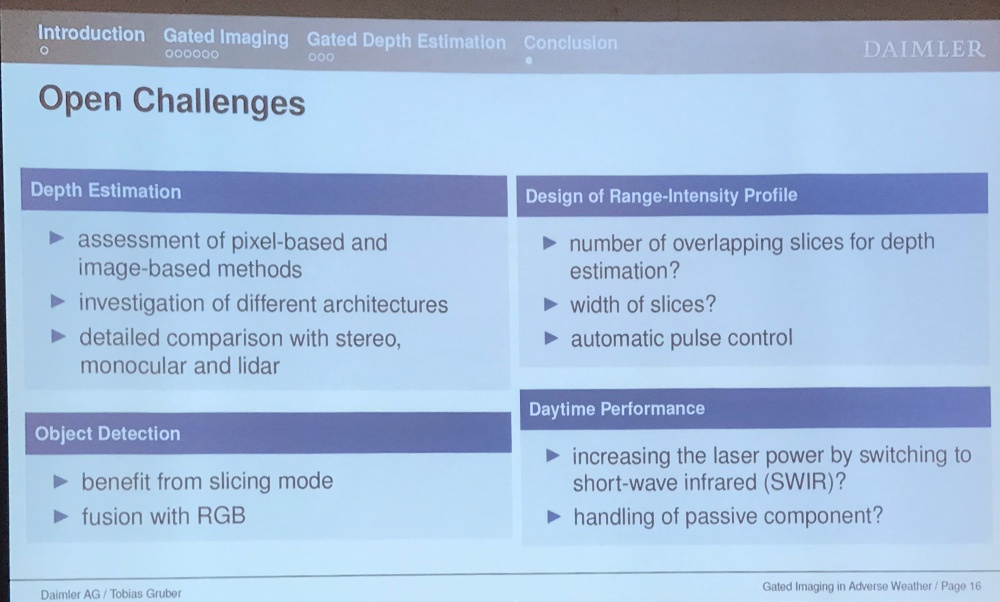
- single illumination and multiple collection?
- distance bins? usually 3, but overlapping, how thick?
- Estimate depth from multiple slides
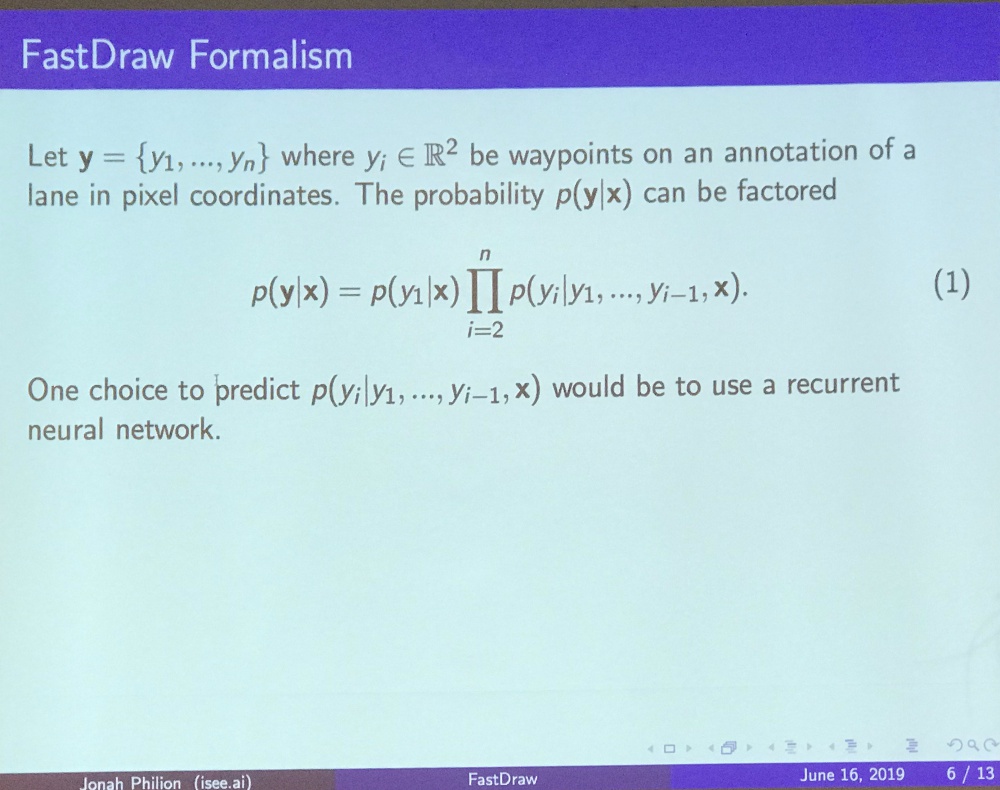
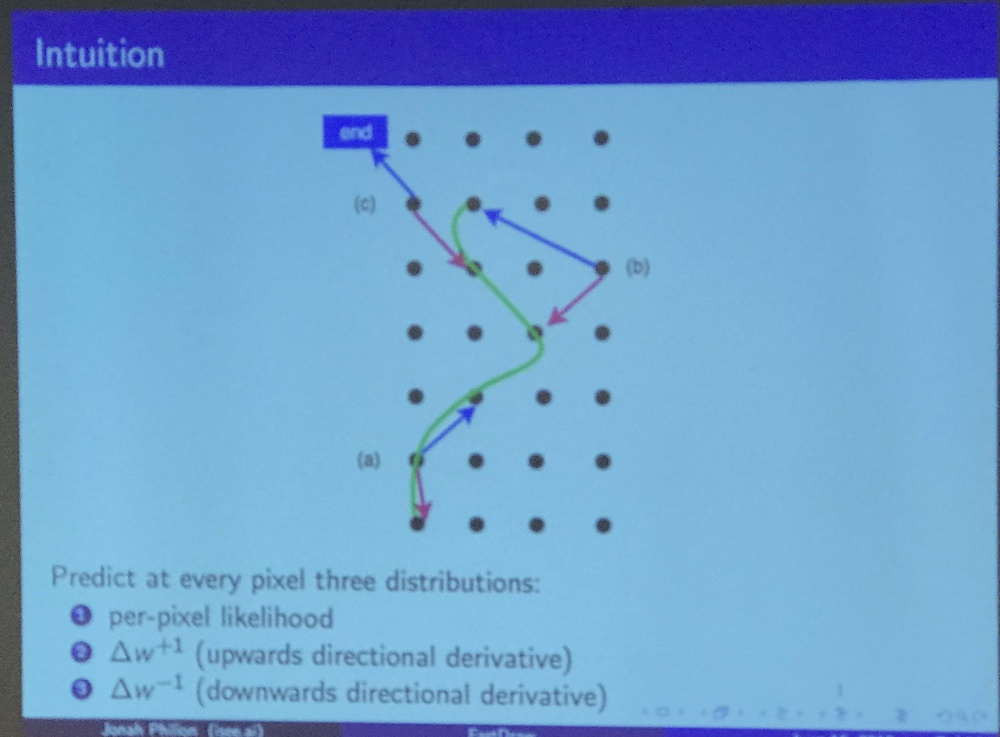
fastDraw: Predict lane lines
- conventional methods
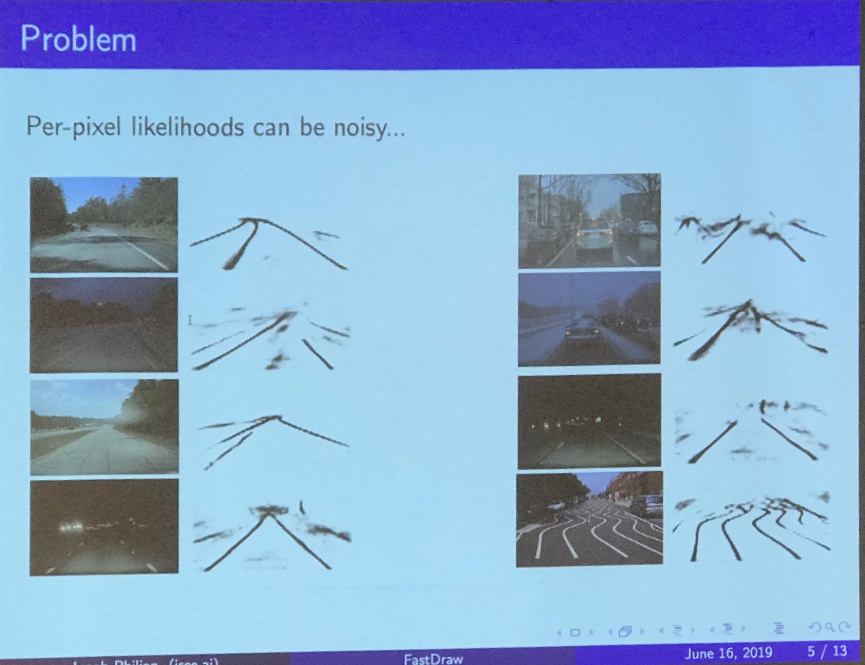
- Assume RNN to be Markov
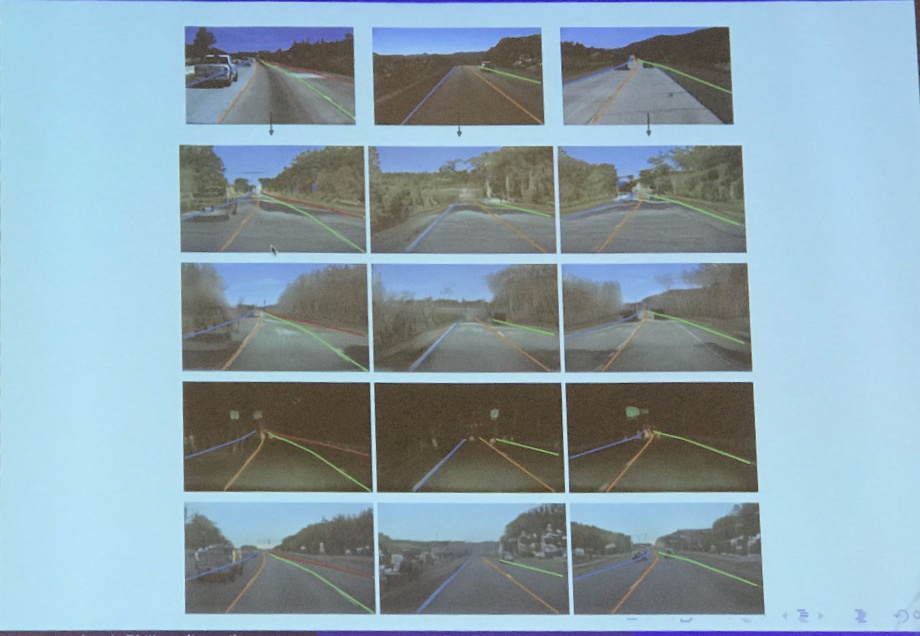
- Style transfer to translate image into other weather conditions, Convert dashed to continuous lines, etc
- With augmentation, both in-domain and out-of-domain
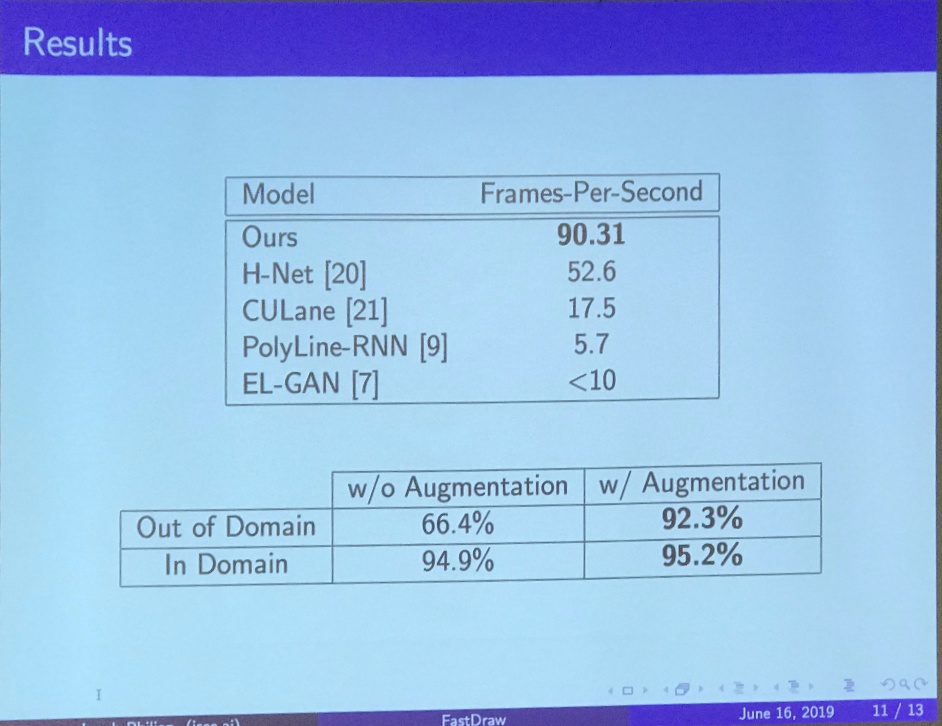
- Tusimple data challenge for lane detection
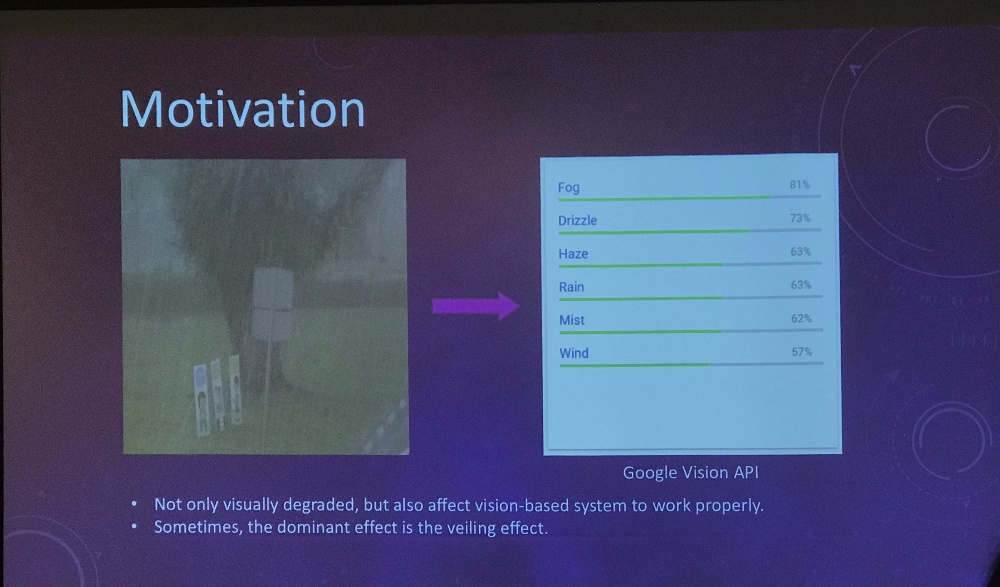
Heavy rain image restoration
- Rain streak removal algorithm: but only good camera can capture rain streaks
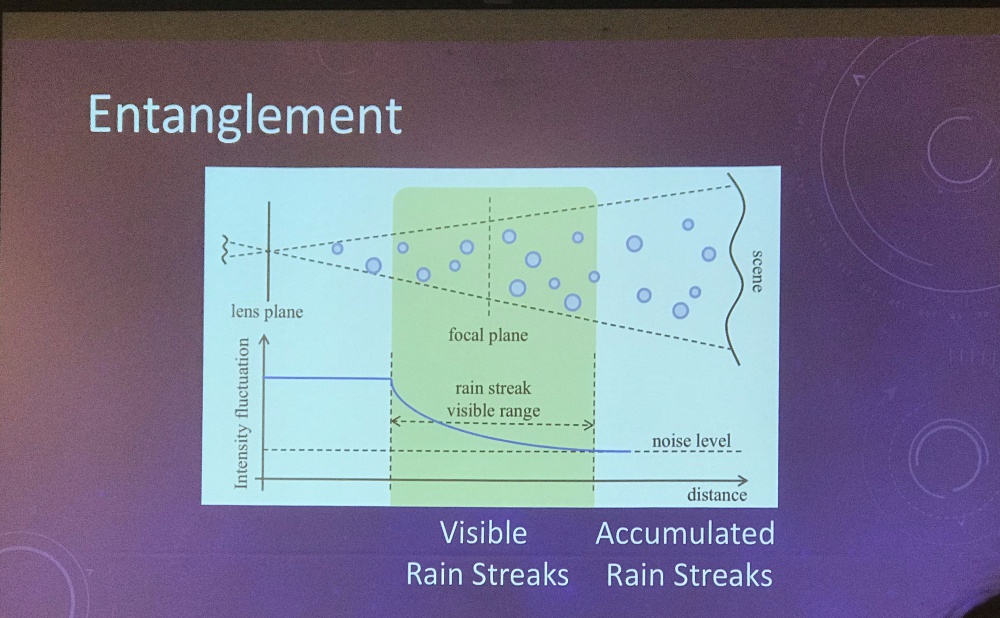
- Accumulated rain streaks
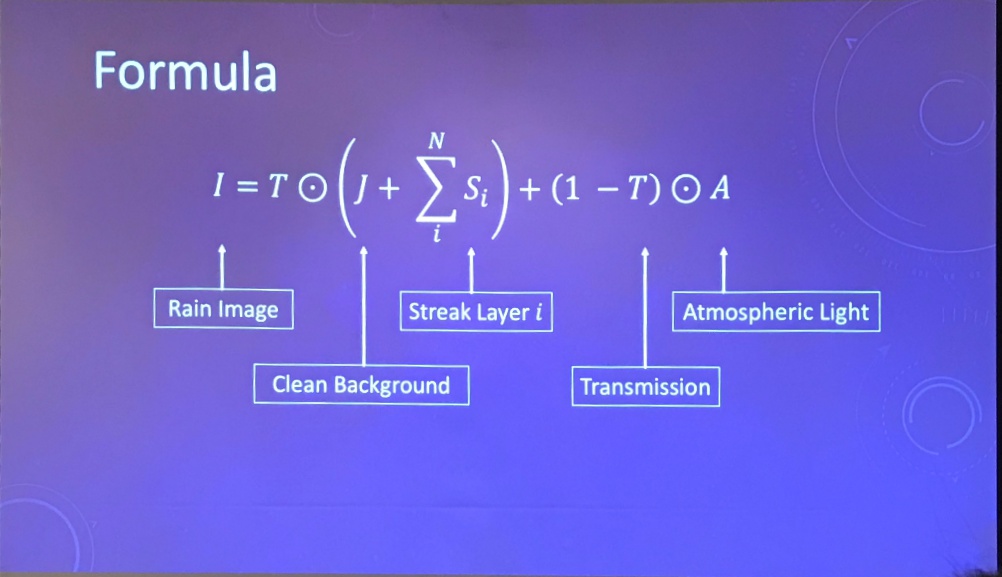
- Fog model formula: what is N?
- Run google vision API to classify
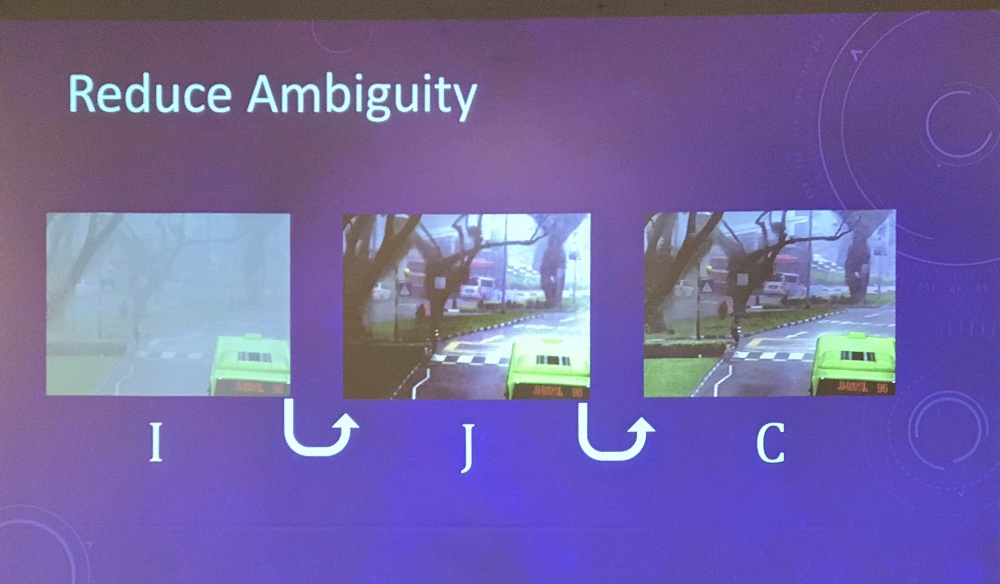
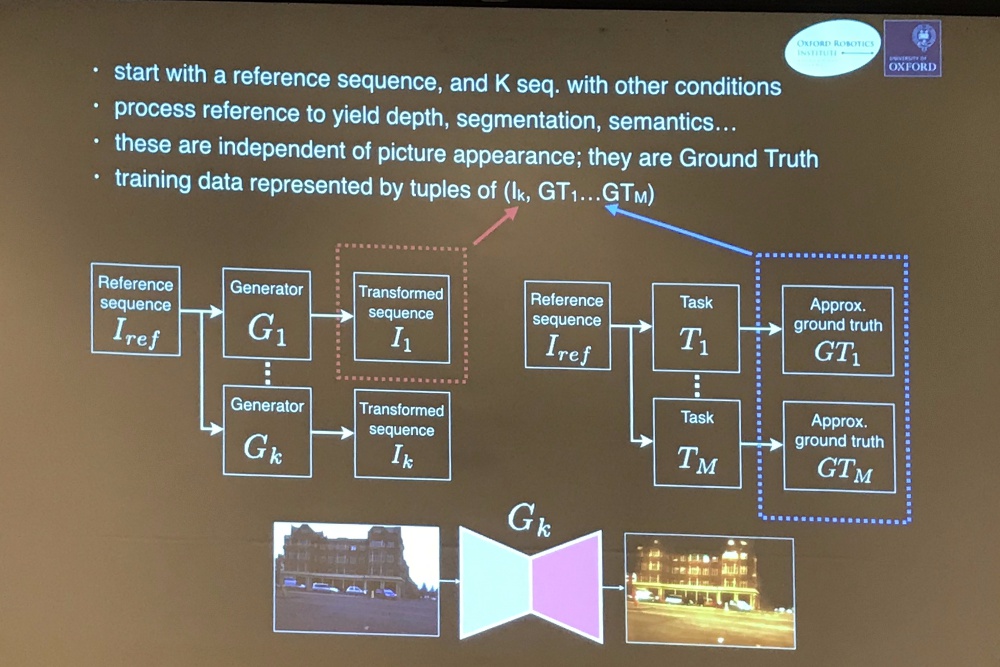
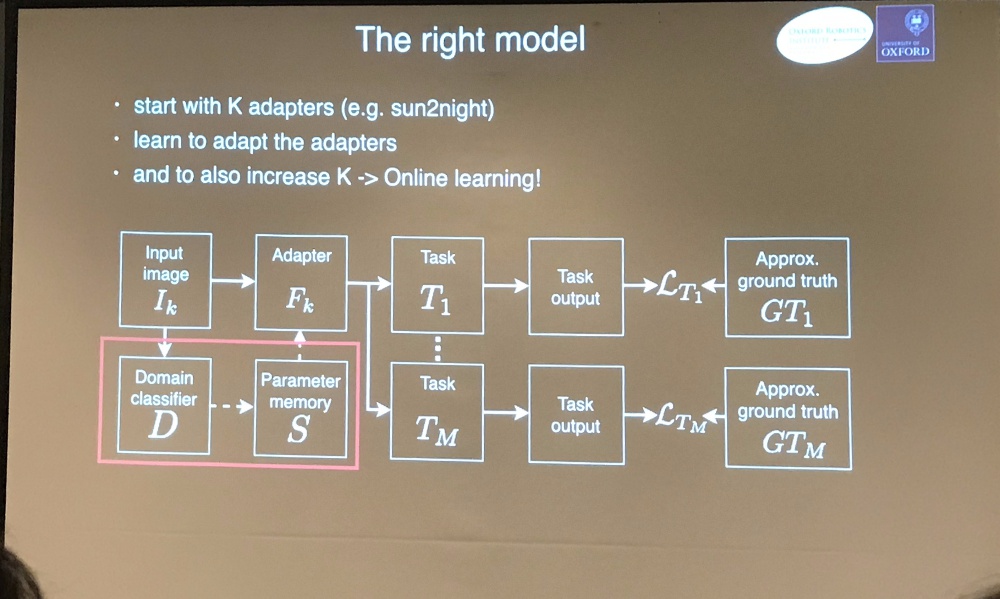
Learn a common representation
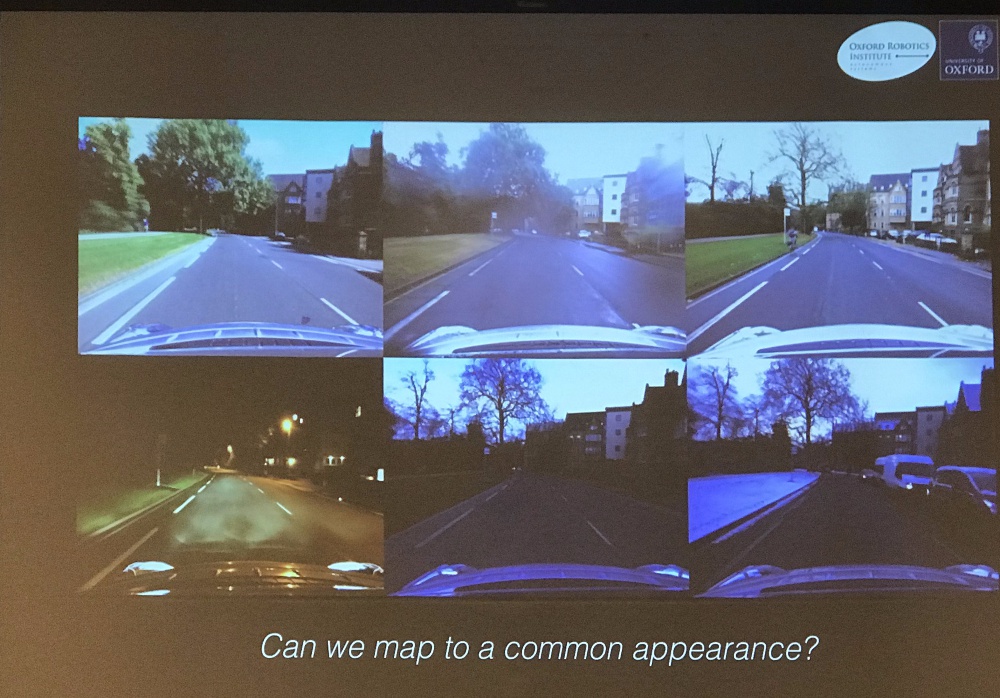
Illumination in bad weather
- Srinivasa Narasimhan from CMU
- Enhance physics/sensors
- people tend to drive fast in fog, due to bad perception of speed – Nature 1998
- MILD database: 25% bad weather in Manhattan
- Defogged photo can also reveal 3D structure
- radar + camera fusion in his phd thesis
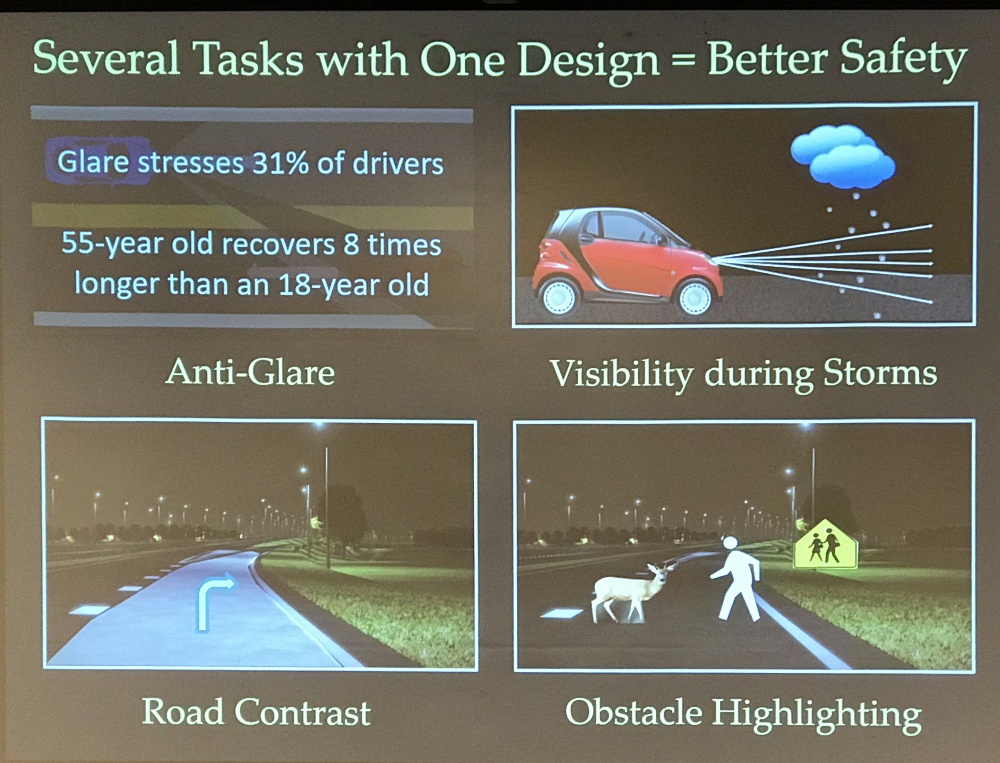
- How to illuminate in poor visibility?
- Why we don’t use high beam in fog/rain
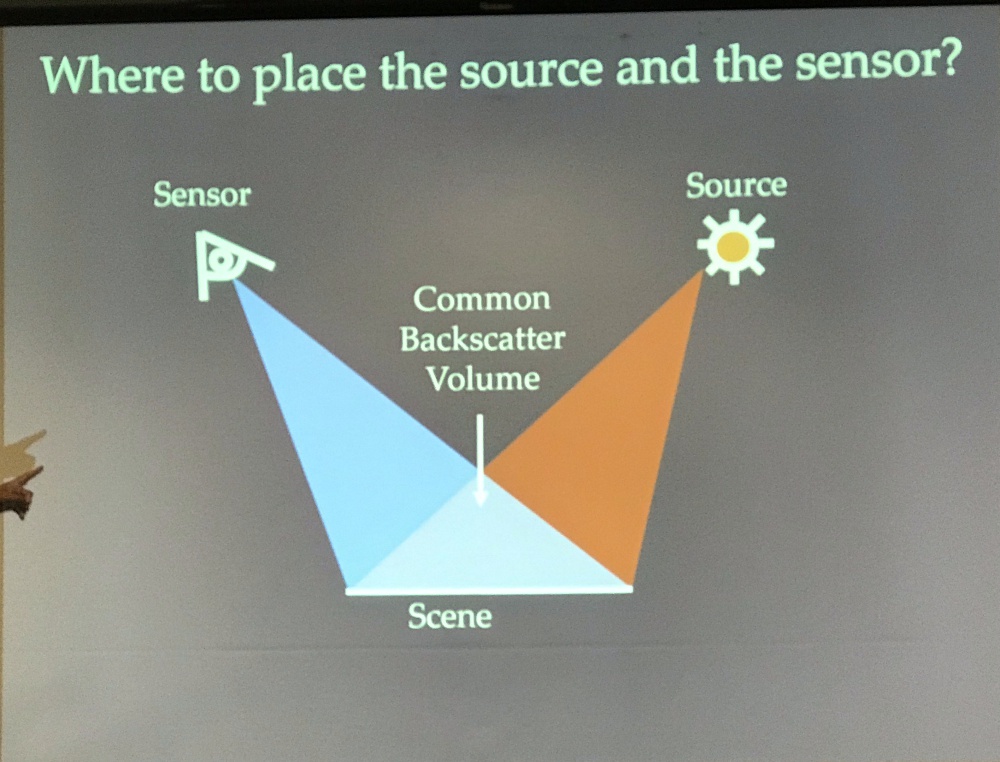
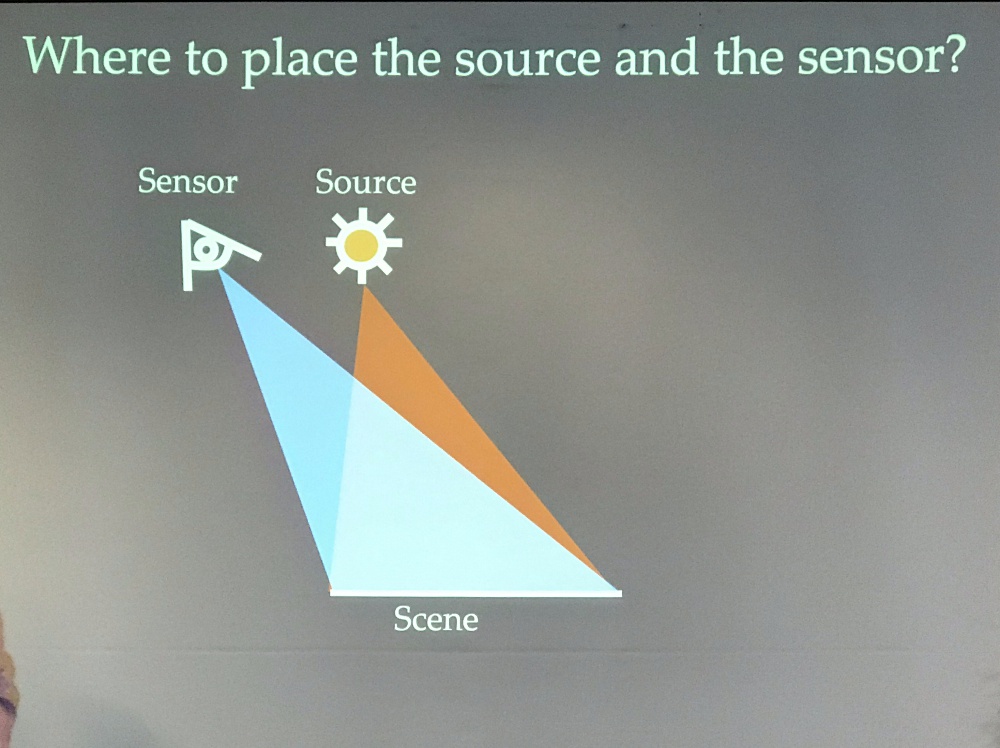
- try to minimize diffuse volume
- Scan with narrow beam very fast
- Why we don’t use high beam in fog/rain
- Combine velodyne puck with kinect depth: light sheet depth imaging
- Epilolar geometry: dense depth measurement at 50 m
- light curtains: obstacle avoidance without computation (see through fog, smoke, etc). (more common in Confocal imaging in microscopy)
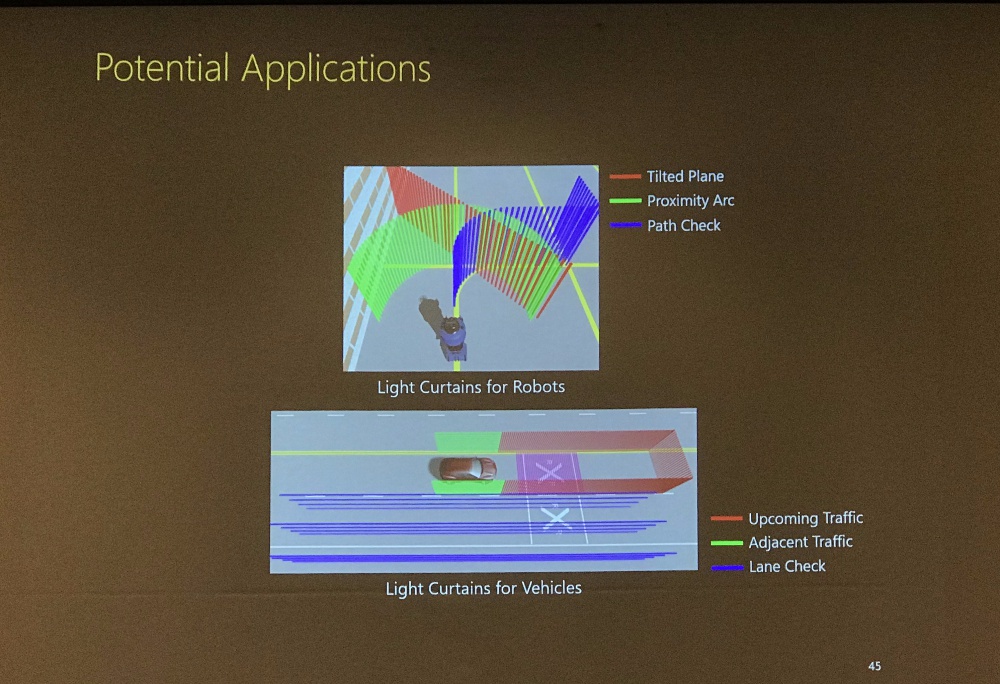
- programmable headlight: 1M light points x 1000 fps. only illuminate objects of interest (beam intensity without glare)
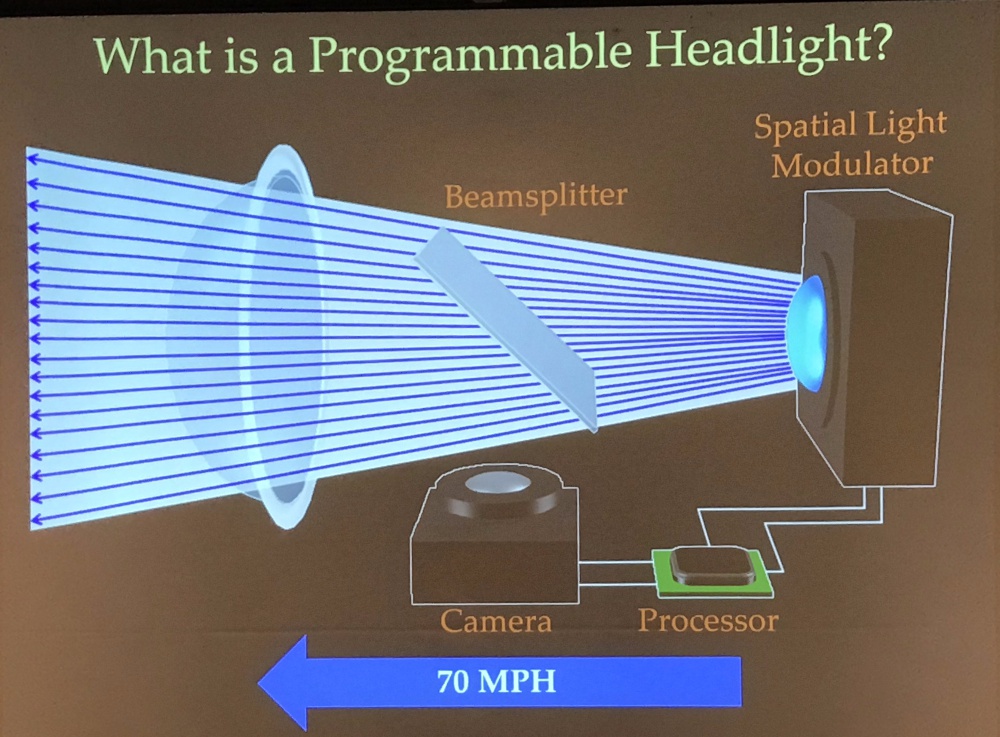
- better visibility through snow/rain (smartly avoiding snow flakes/rain drops)
3D detection across weathers, conditions, and locations: algorithms and benchmarks
- Daniel Cremers @ MTU
- SLAM: BA (bundle adjustment)
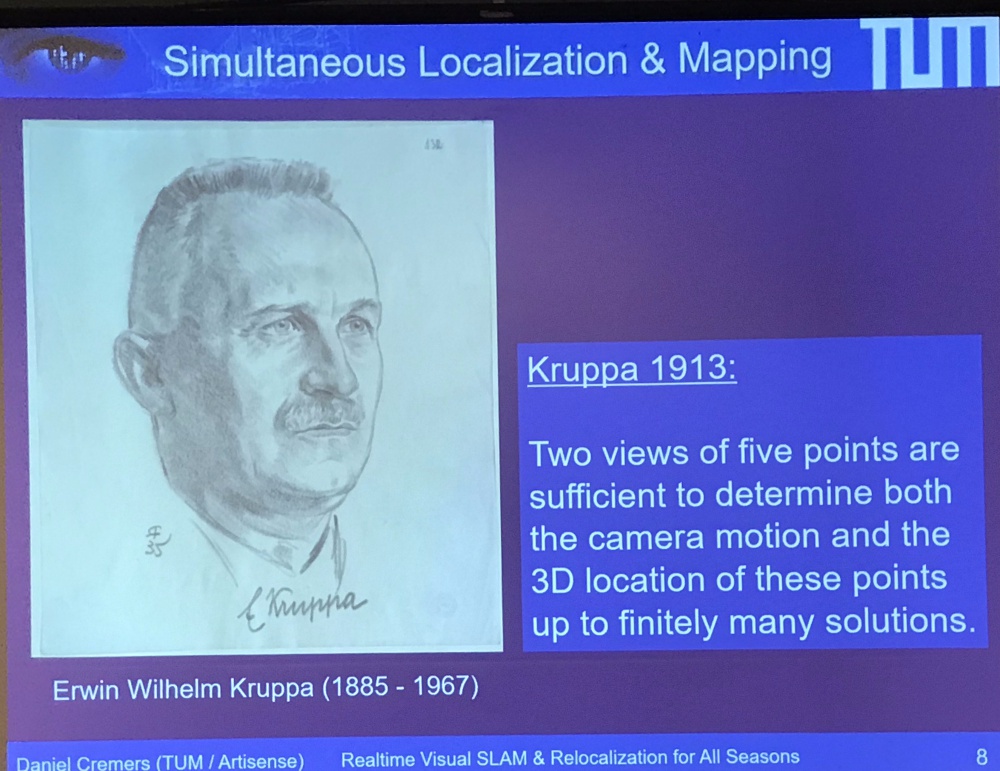
- But Kruppa is misleding:
- Why only two images? why only points?
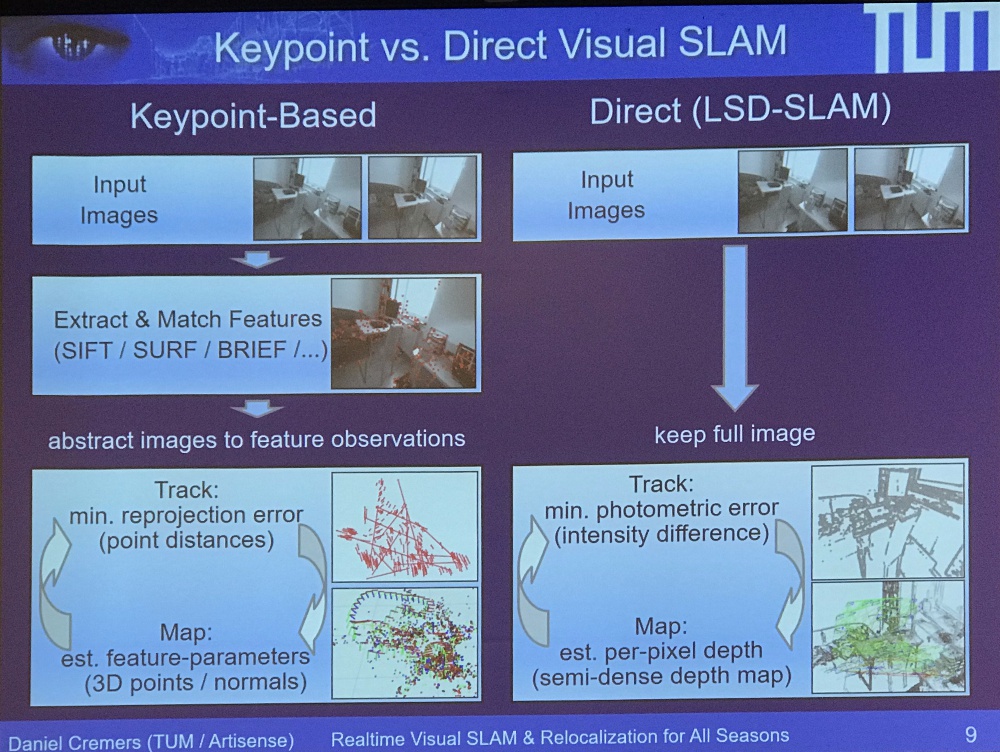
- Why only two images? why only points?
- min reproj error of key points only vs photometric error: all pixels contribute to the photometric error. Color consistency is the key
- DSO is much better than ORB-SLAM
- SLAM: GPS is not robust: multi-path in urban canyon, NA in tunnel
- Q: How to incorporate IMU or GPS signal? ICRA 2018: visual-inertial DSO. Integrate these measurement in the loss function. But the main challenge is the synchronization of measurement.
- Deep network end-to-end, but how to incorporate the existing knowledge?
- Yang et al ECCV 2018, use monocular, but estimates stereo disparity map
- Depth from a single image with conventional method usually lead to inaccurate scale, but DNN is good at it
- Scene understanding: Build a
- Relocalization: you have a map, localize yourself inside the map.
- Gauss-newton loss, Von Stumberg, arxiv 2019
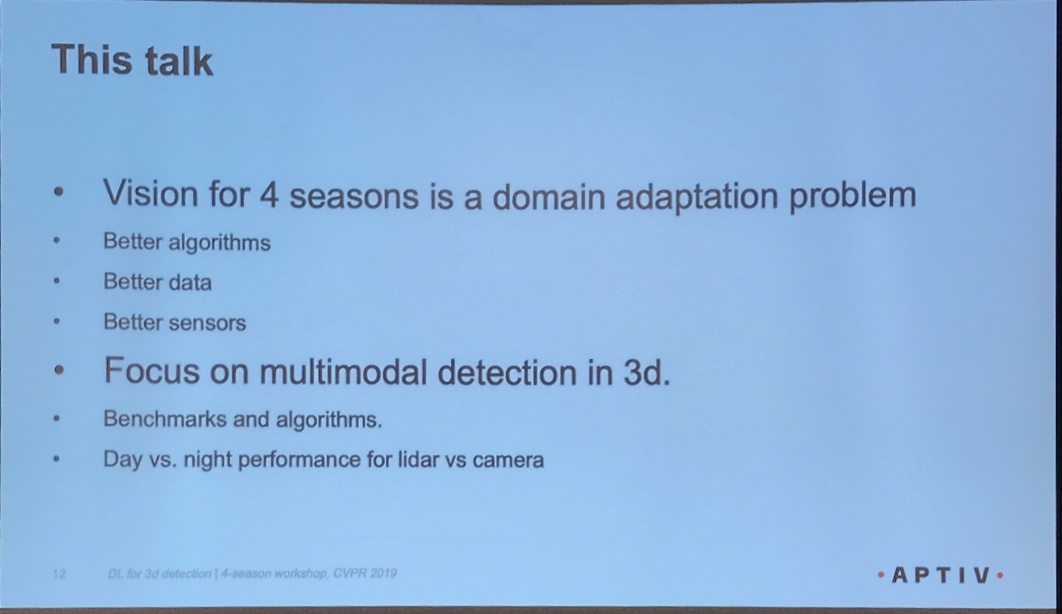
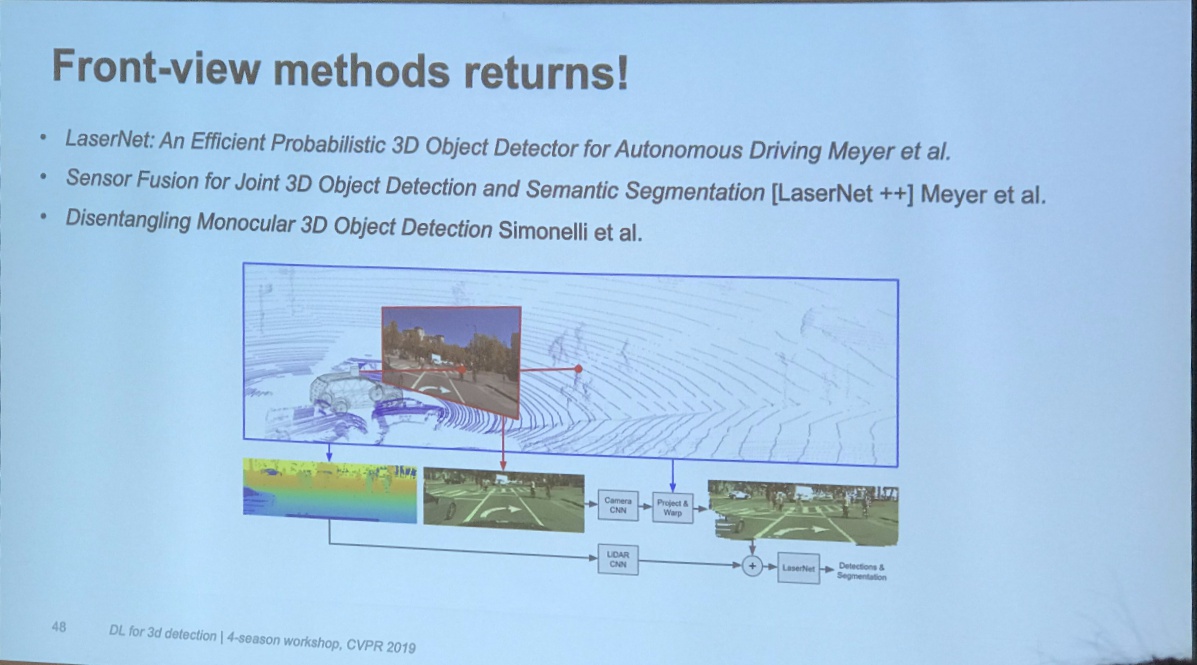
NuTonomy Talk on Nusences and 3D object detection
Panel discussion
- How to measure the adversity of environment (data quality as well)? And measure algorithm performance degradation a a function of the harsh-ness of environment.
06/17/2019 (Monday)
Killian Weingerger@Cornell
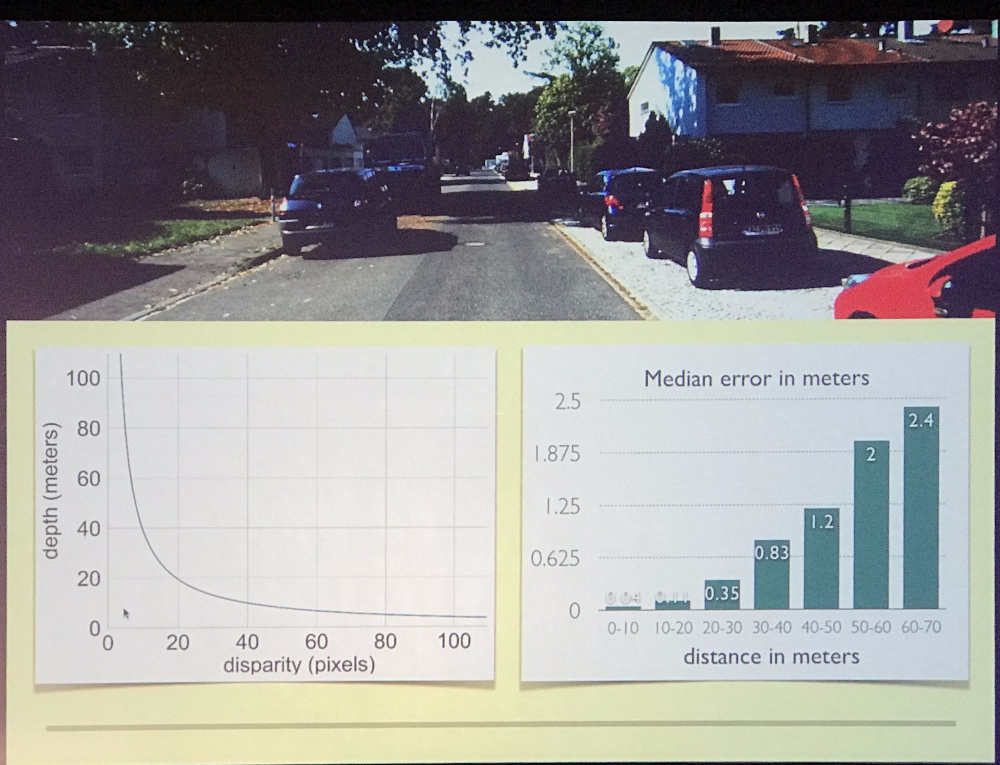
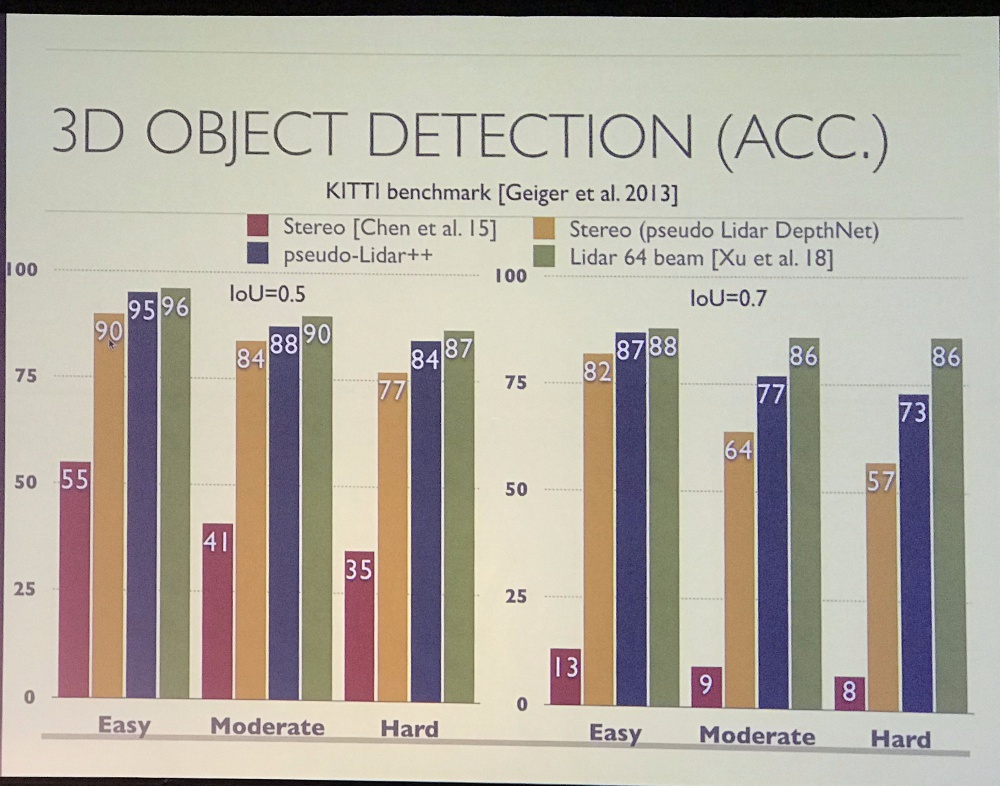
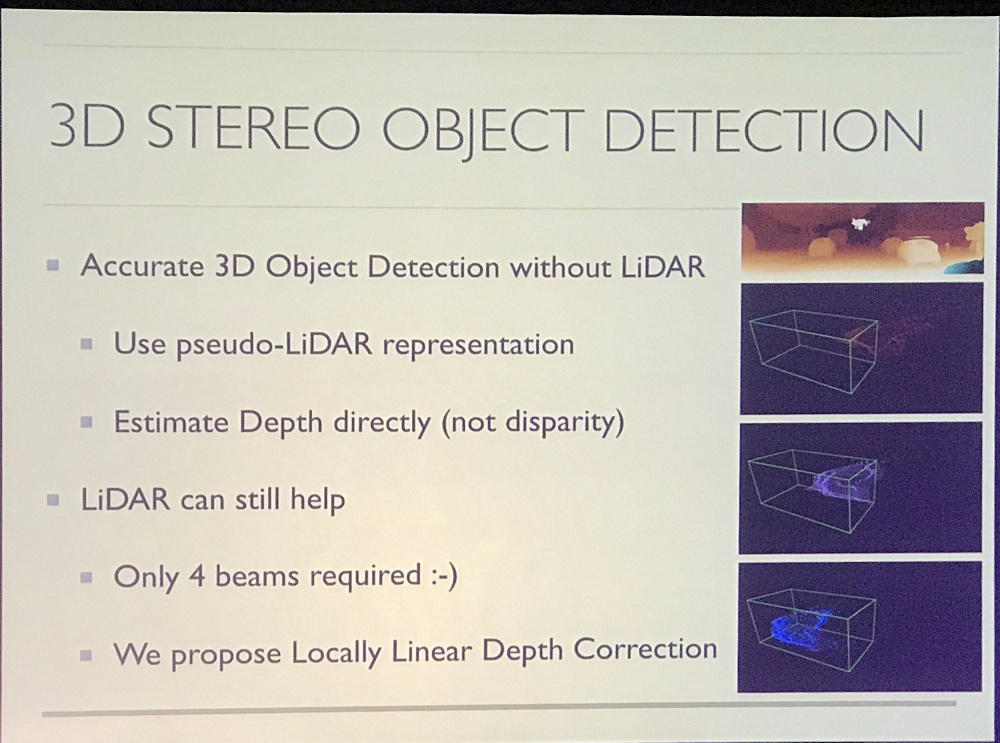
- 3D object detection without expensive lidar (stereo vs lidar)
- Huge performance difference between stereo vs lidar –> but the gap is due to representation of data
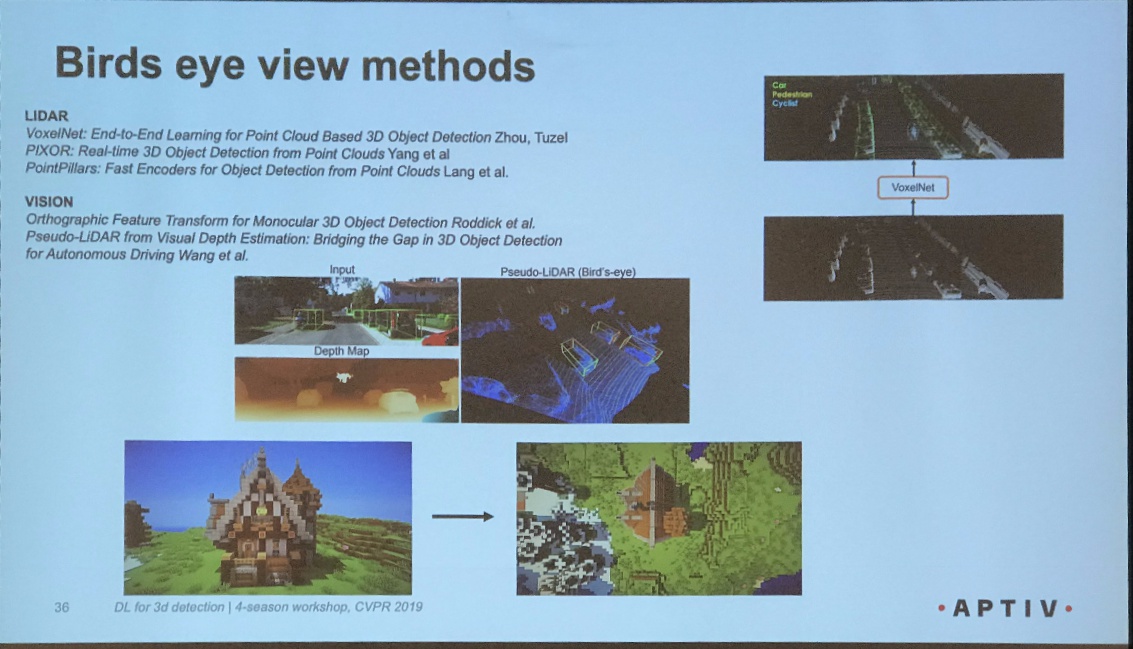
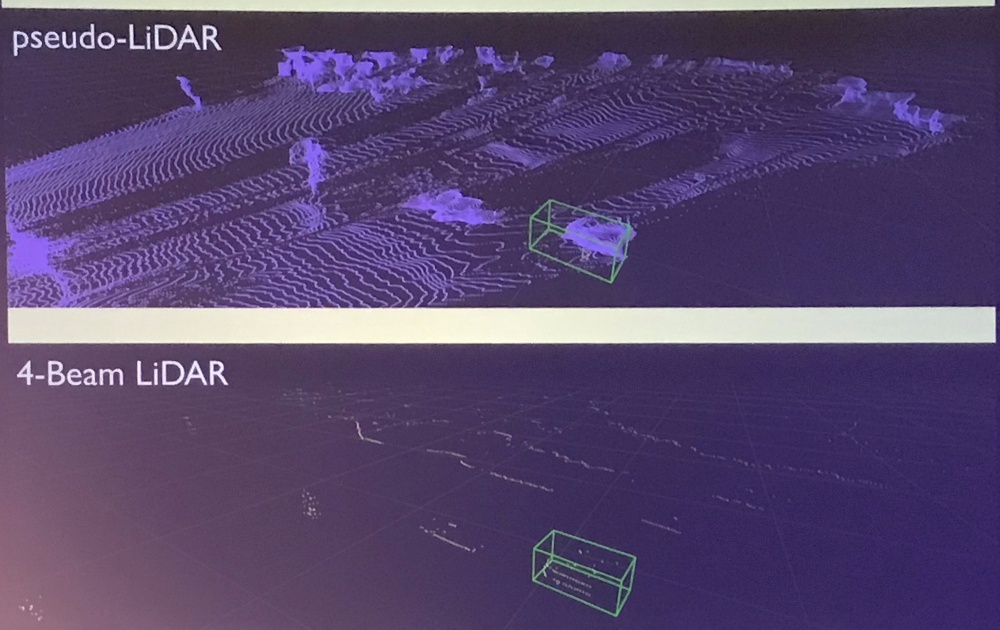
- Pseudo-lidar (mimic lidar with depth map from mono or stereo)
- You cannot apply conv map on depth map: front depth maps are ill suited for convnets
- Change of representation leads to huge boost
- However depth are inaccurate! Disparity are optimized in the wrong way
- conv filters on disparity map is a wrong thing, leads to depth bleeding effect
- for objects that are far away, pixel difference means different things!
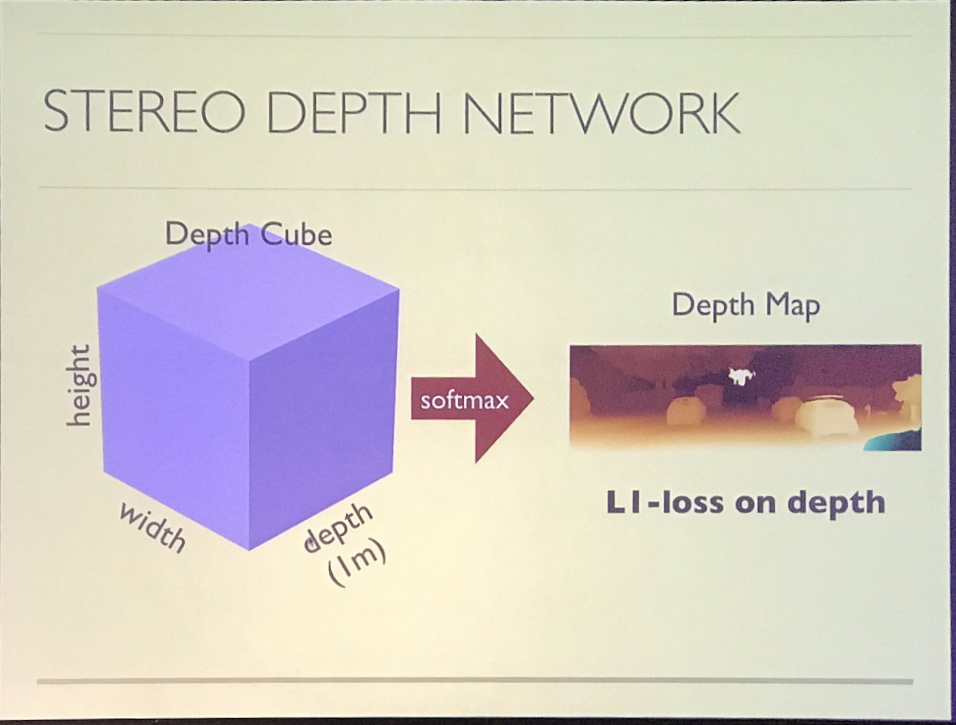
- Solution: don’t estimate disparity, estimate depth!
- Stereo depth network: optimizes depth cube (in unit of meters)
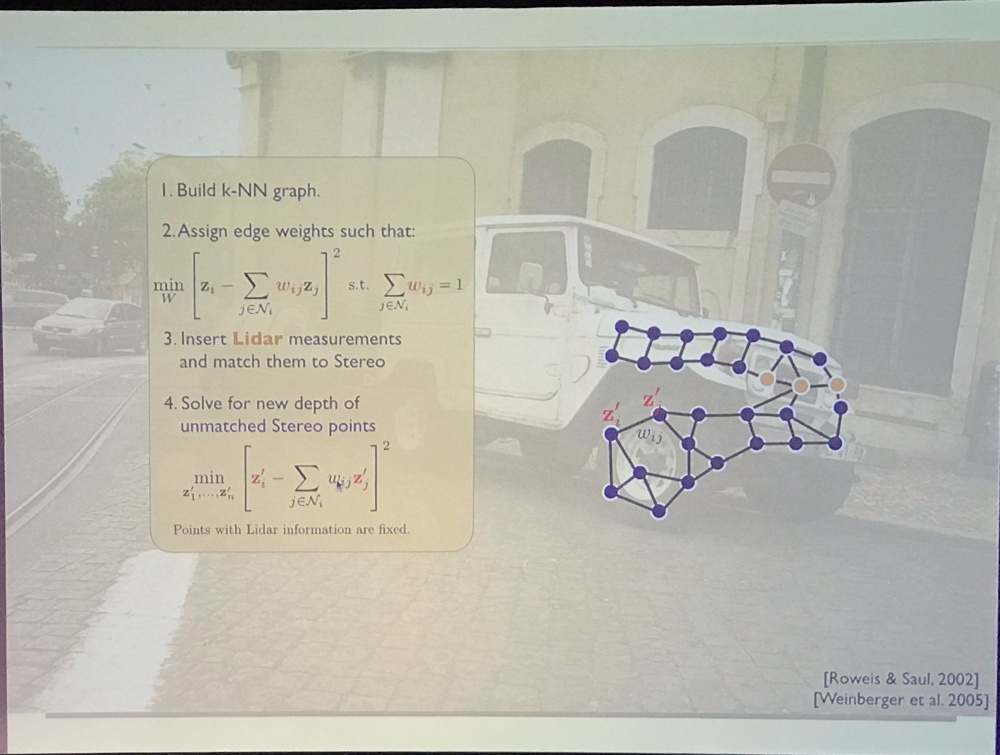
- Use sparse lidar measurement to correct wrong estimation
- Affinity is correct
- Correct the whole object (locally linear depth correction)
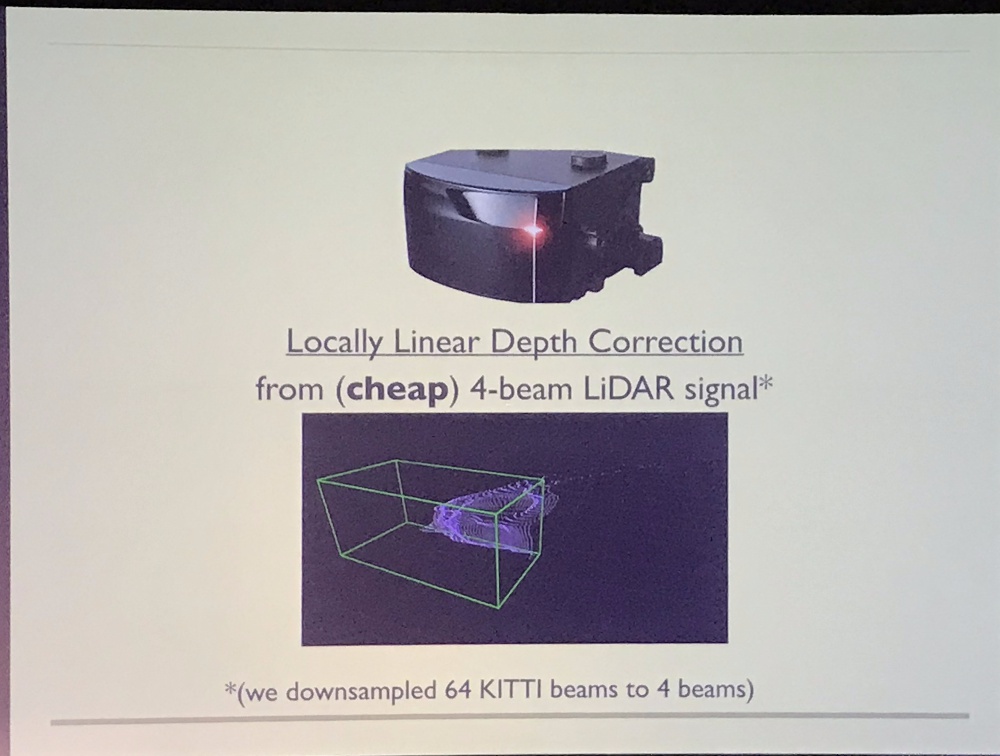
- Note Pseudo lidar++ uses four-line lidar to correct depth
Alex Kendal@Cambridge+Wayve
- Nvidia weather in 2016
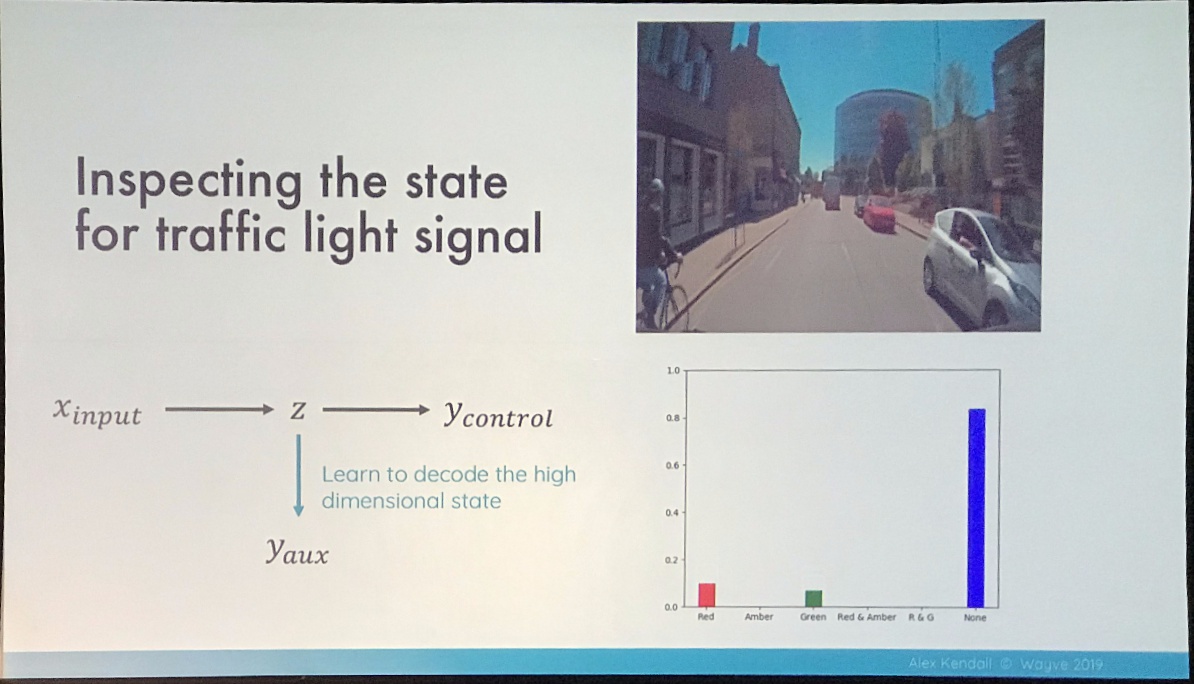
- Self driving state representation today
- 3D object detection
- semantic segmentation
- agent prediction
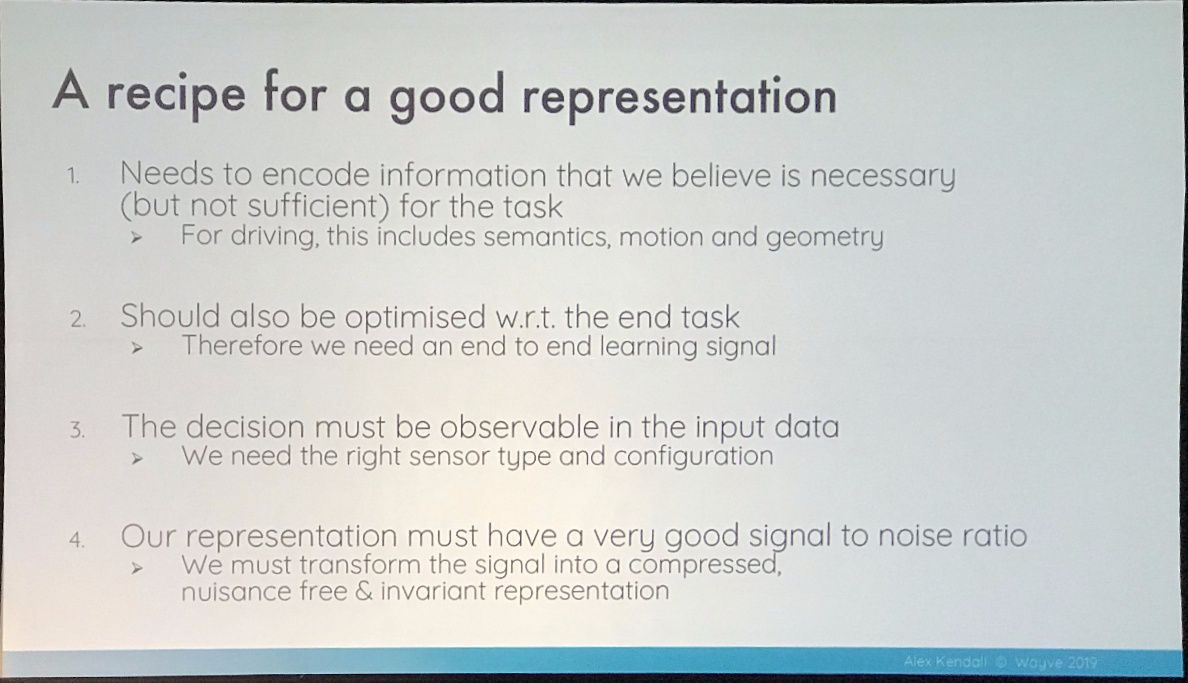
- A good representation
- Driving data is exceptionally biased. Turn log-tail distribution to normal tail distribution
- How to get more human guidance in an exploration setting? –> simulation
- Q: Sim2real problem –> how to learn a proper representation?
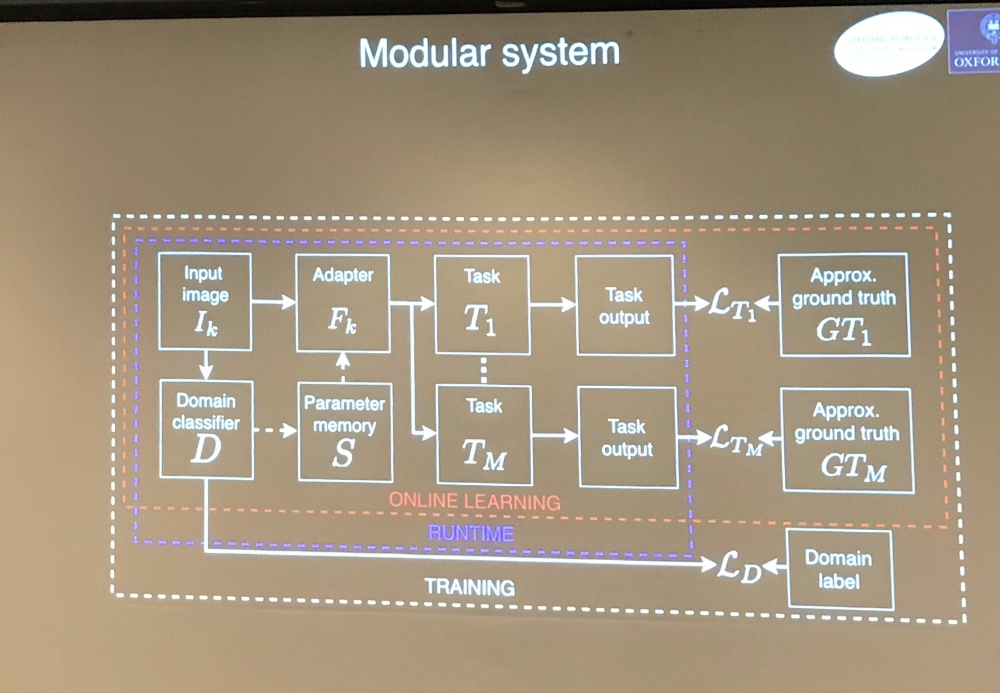
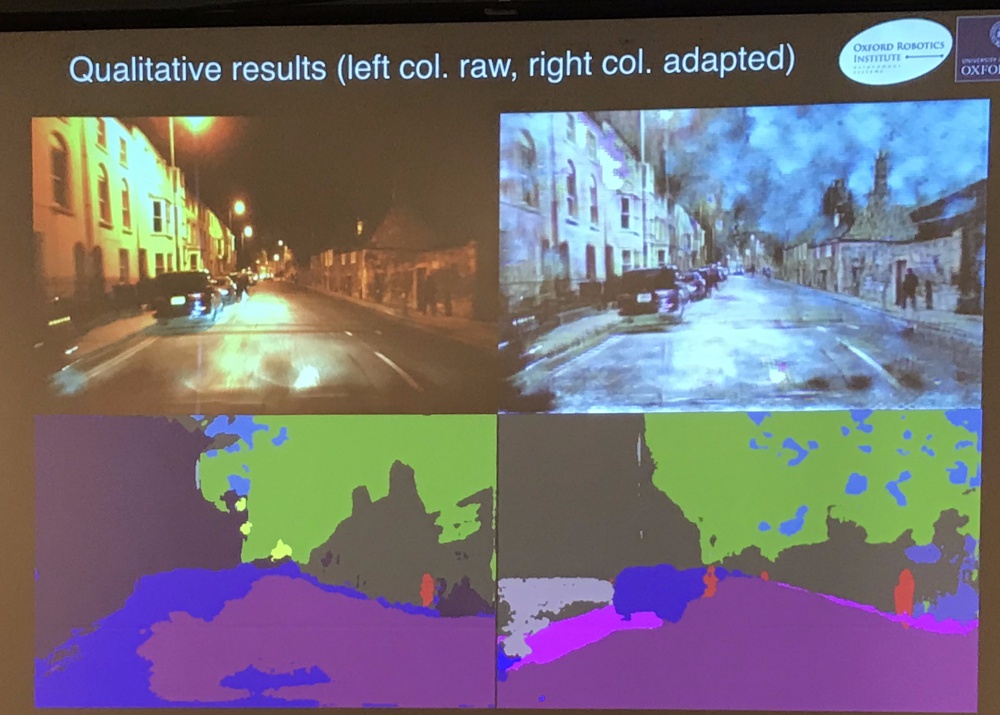
- zero shot sim2real: Learning to Drive from Simulation without Real World Labels: learn to project to a latent space for domain adaption and control jointly.
- Interpretation/Verification of DL representation
- Real Time Image Saliency for Black Box Classifiers
- Interpretable Explanations of Black Boxes by Meaningful Perturbation
- Note learn to encode state for traffic light from mid-unet layers and
- What metric to optimize?
- We care about minority cases more
- Note: Difference with Go and DOTA
- Games states are easy (discrete, fully observable or noise free), but action space are huge
- autonomous driving: state space is huge, but action space is simple
Trevor Darrell@BAIR
- 3D tracking
- occlusion aware 3D tracking
- Joint Monocular 3D Vehicle Detection and Tracking
- Monocular Plan View Networks for Autonomous Driving
- Explainable/causal driving policies
- Localization
Raquel Urtason@Uber ATG
- Redundancy
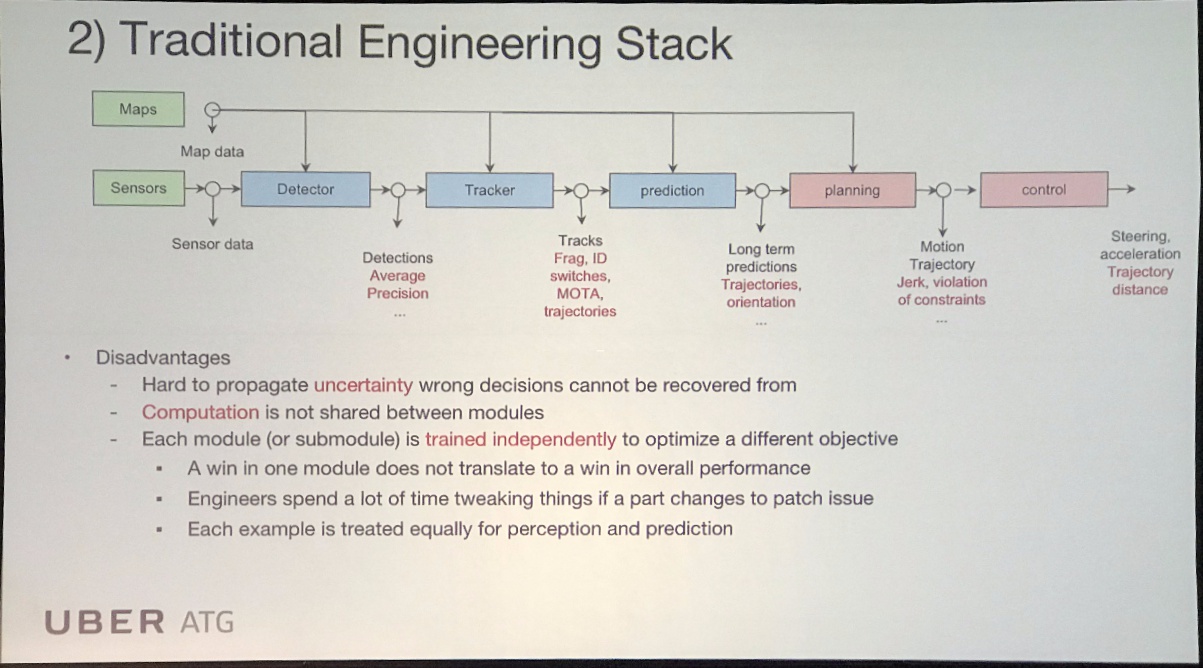
- Disadvantage of traditional engineering stack
- hard to propagate uncertainty
- computation not shared between modules
- Each module is trained separately to optimize diff objectives
- Not all actors influence driving behavior
- Most critical object need to be evaluated separately
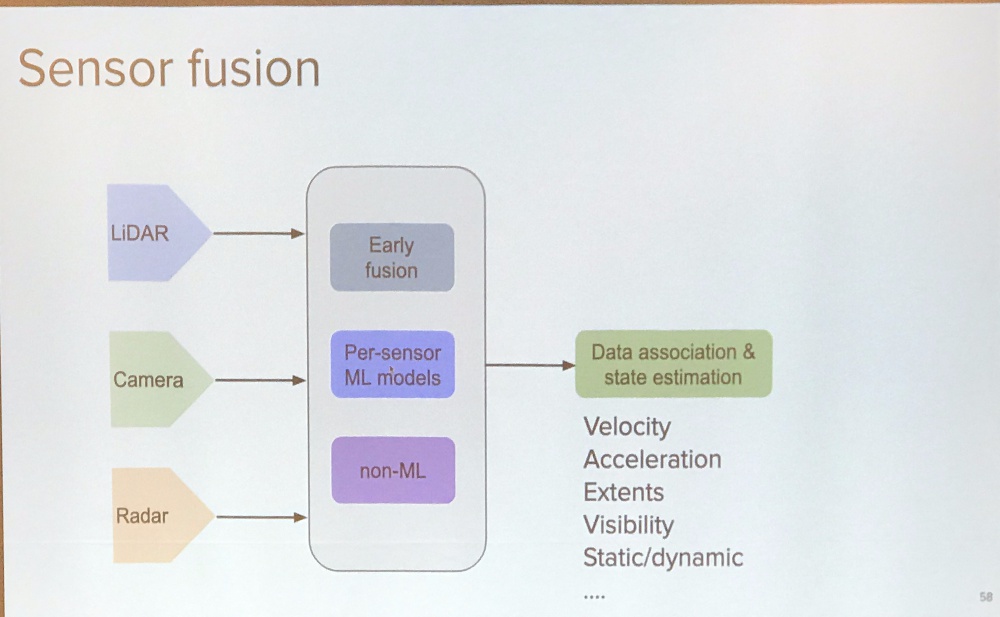
- Multi-sensor fusion: Liang et al, CVPR 2019
- Xiong et al, CVPR 2019 oral, UPSnet, UPSNet (A Unified Panoptic Segmentation Network)
- Joint perception and prediction
- Luo et al, CVPR2018 oral (prediction of waypoint in the future)
- IntentNet: CoRL 2018
- stopped vs park
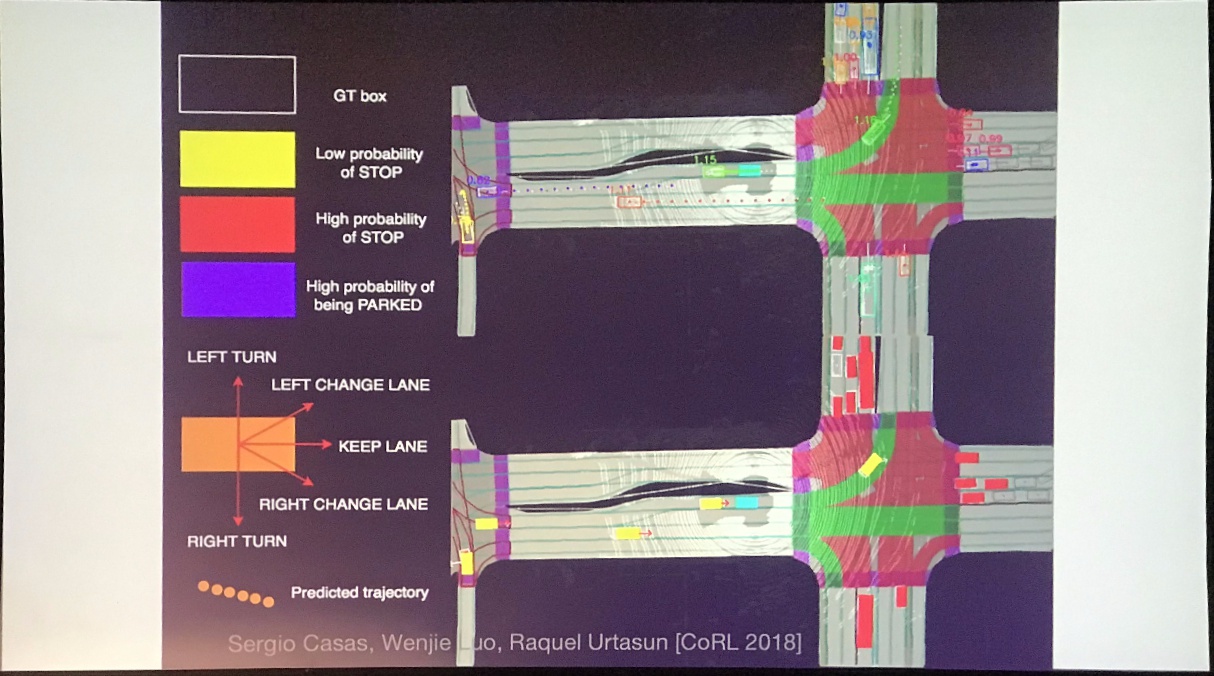
- Human showcase their intent, indicator/turn signal detection (ICRA2019)
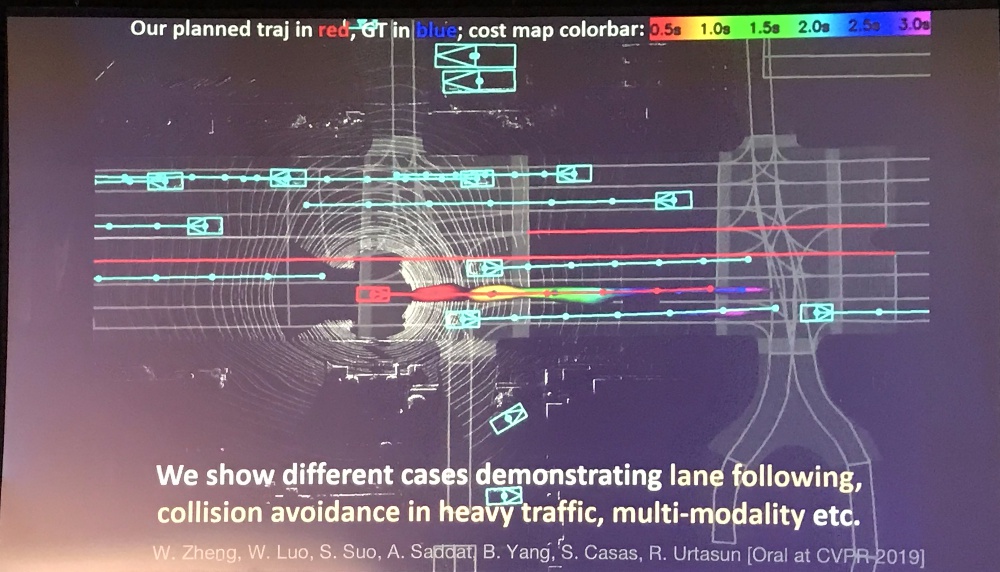
- Joint Perception/prediction/planning
- Zheng, oral at CVPR 2019, End-to-end Interpretable Neural Motion Planner
- AI in HD maps
- Liang et al, CVPR 2019 (Convolutional Recurrent Network for Road Boundary Extractio)
- detection of construction elements
- AI for localization
- VLAD for image retrieval
- AI for simulation
- capture the world and simulate sensor input
- separate static scenes and dynamic objects
- real lidar and simulated lidar look almost the same
Perception, Prediction, Data Collection for Autonomous Cars (from Lyft Level 5)
Luc Vincent@EVP
- 14% of LA is parking!
- 1% of miles are ridesharing
- Lyft Level 5
- Building blocks
- Robotics platform
- Perception and prediction
- Map and localization
- Motion planning
- Motion control
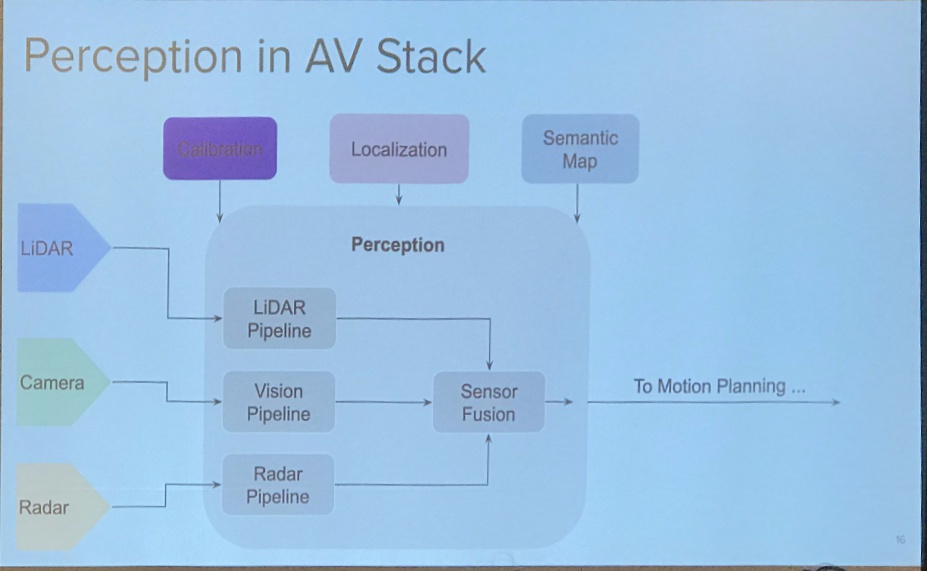
Ashesh Jain@perception
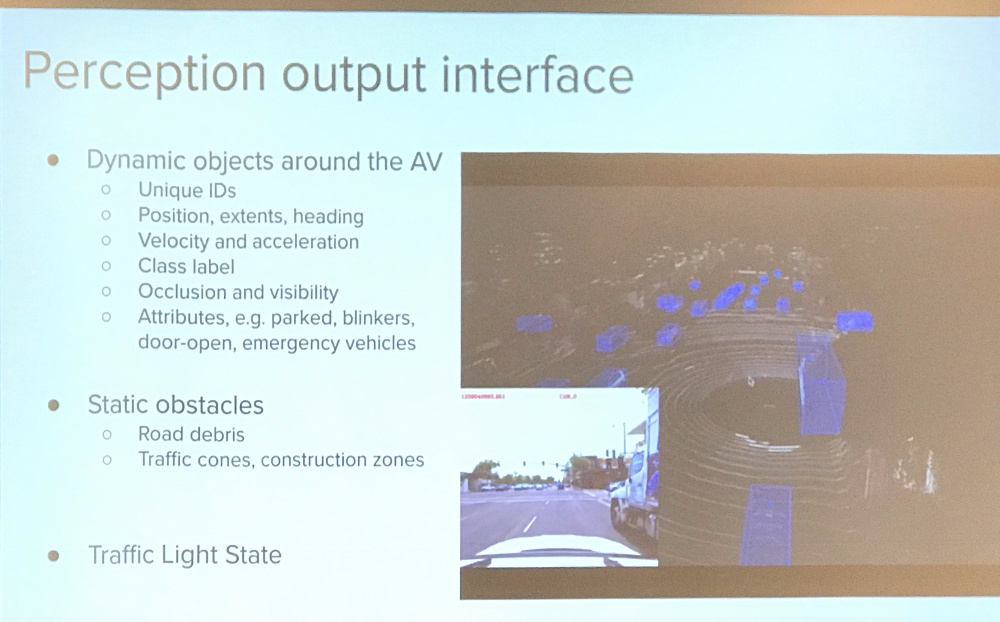
- Perception stacks
- Challenges
- sensor performance degrades with distance
- Data Labeling errors –> need to be sent back to data labeling team for correction
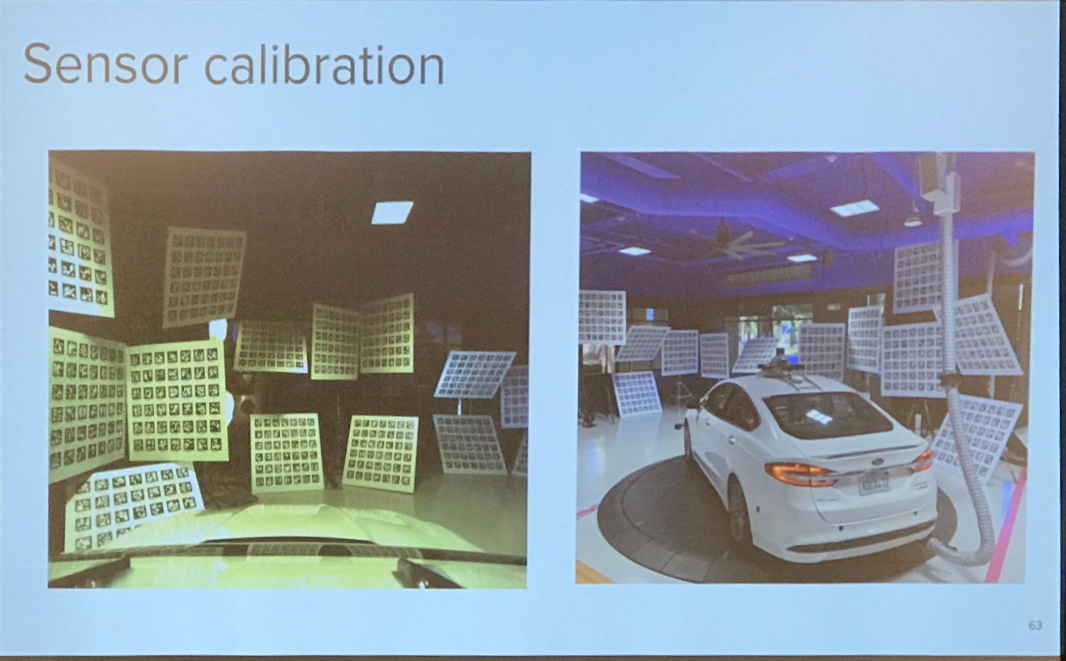
- Notes sensor synchronization: needed for accurate annotation of MOD, trigger the camera when lidar sweeps through the camera’s field of view
- Not all data are equal
- Automatically finding similar cases for labeling
- Class imbalance
- Solution: Data Sampler (like data booster), dump to database
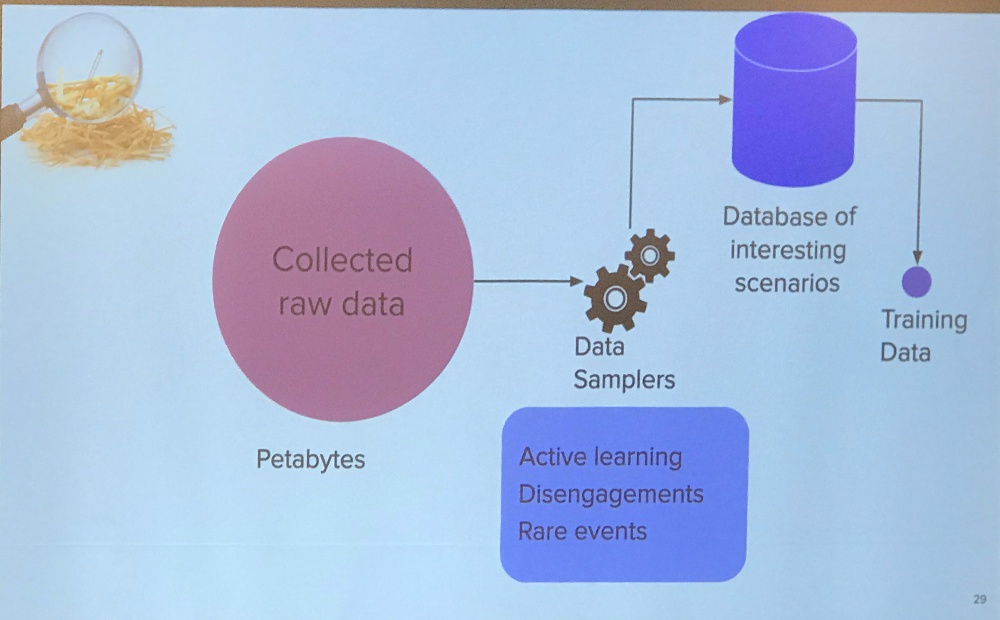
- Query of data: get images with more than 20 pedestrians
- 2D detection has been democratized
- Point cloud deep learning
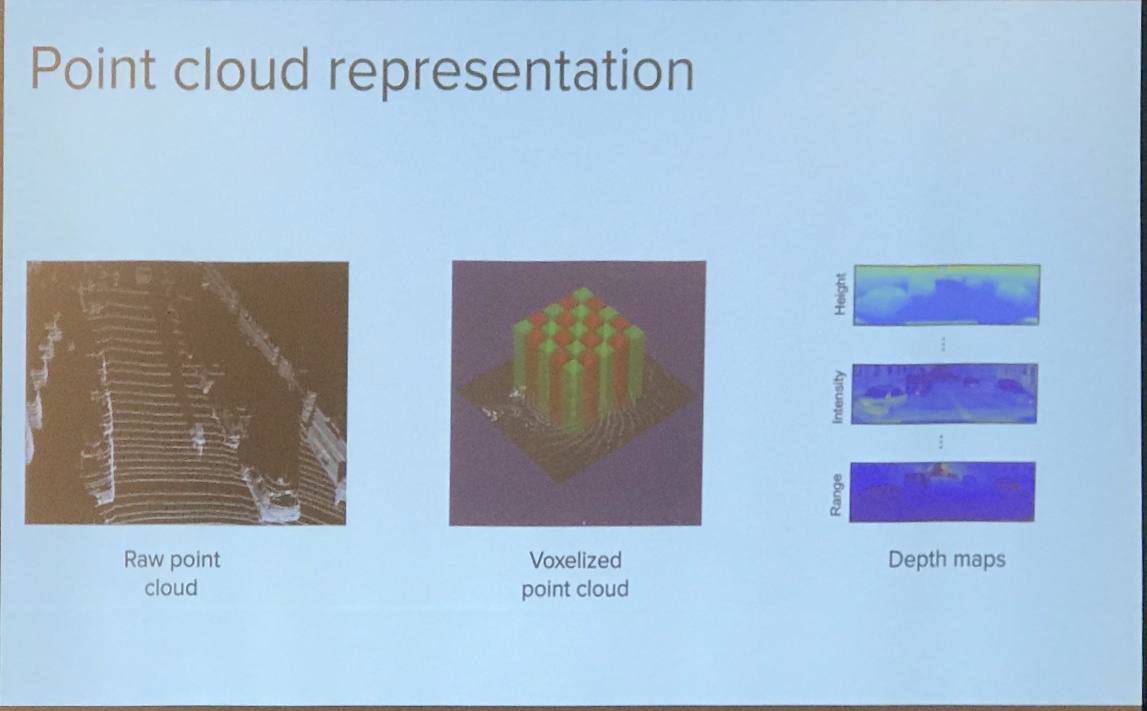
- Embedding of point cloud (interesting view point, like word2vec for words)
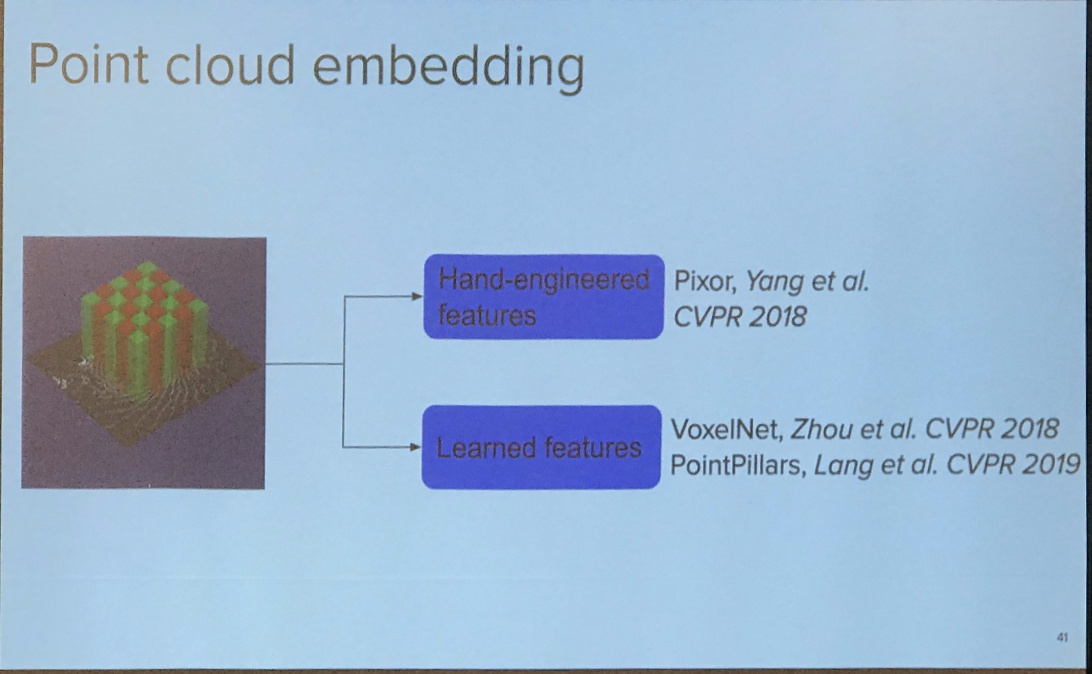
- Point cloud embedding
- PointNet does not help with outdoor scenes, global feature embedding works better indoor
-
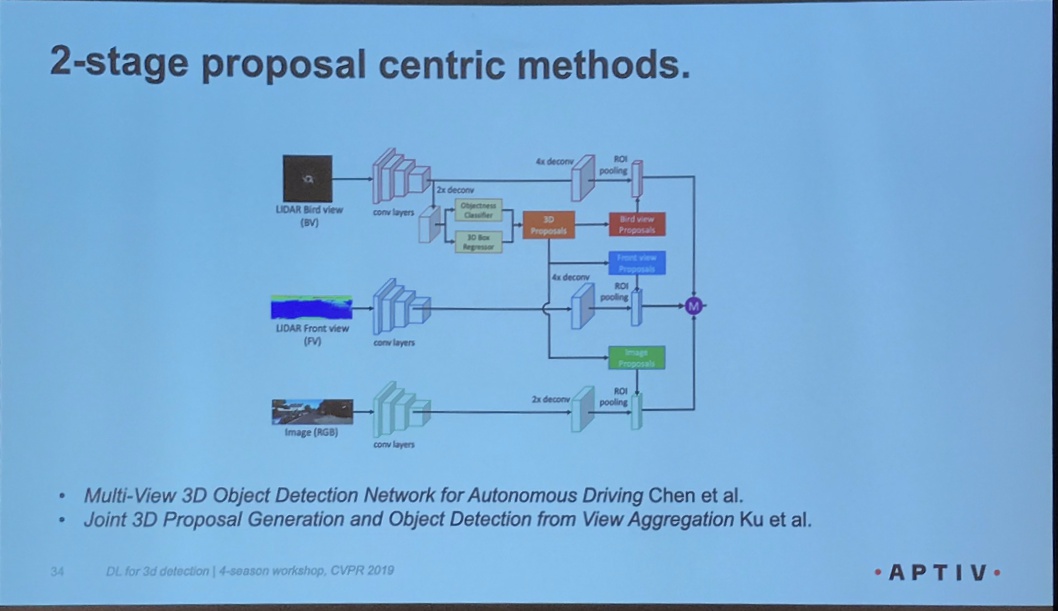
VoxelNet or PointPillars Pixor (hand crafted) - Multi-task multi sensor fusion from Uber
- Practical
- unclassified clutter on the road
- Need class agnostic pipeline
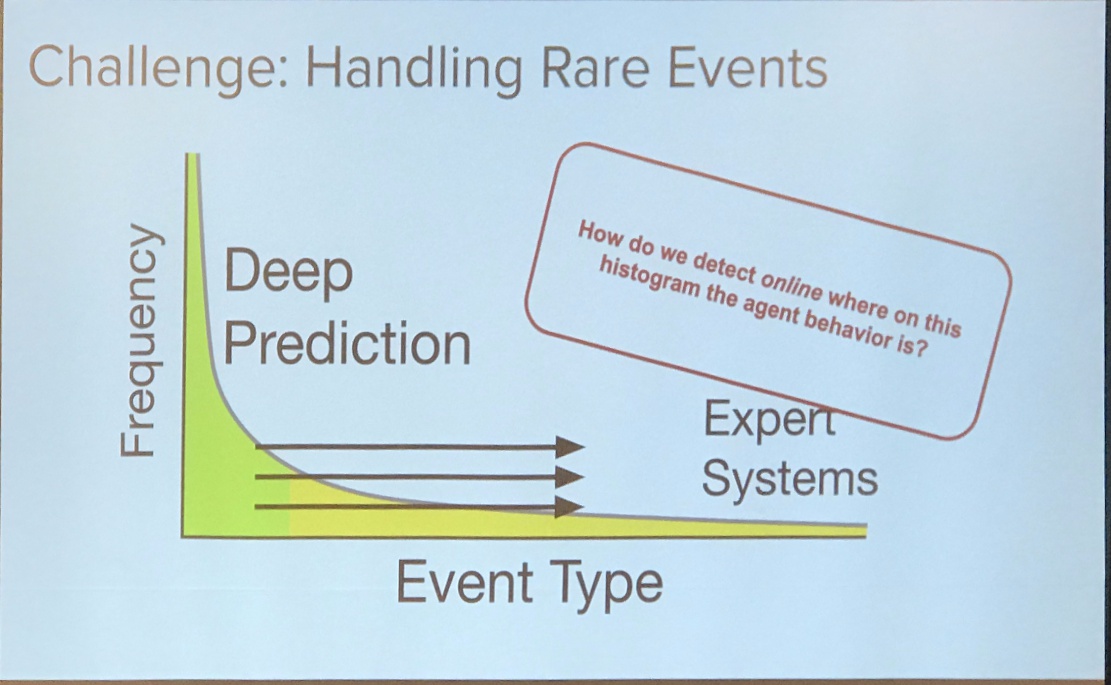
- Perception is not just about Deep Learning
- Modeling uncertainties in neural networks with DL and expert systems in a DAG
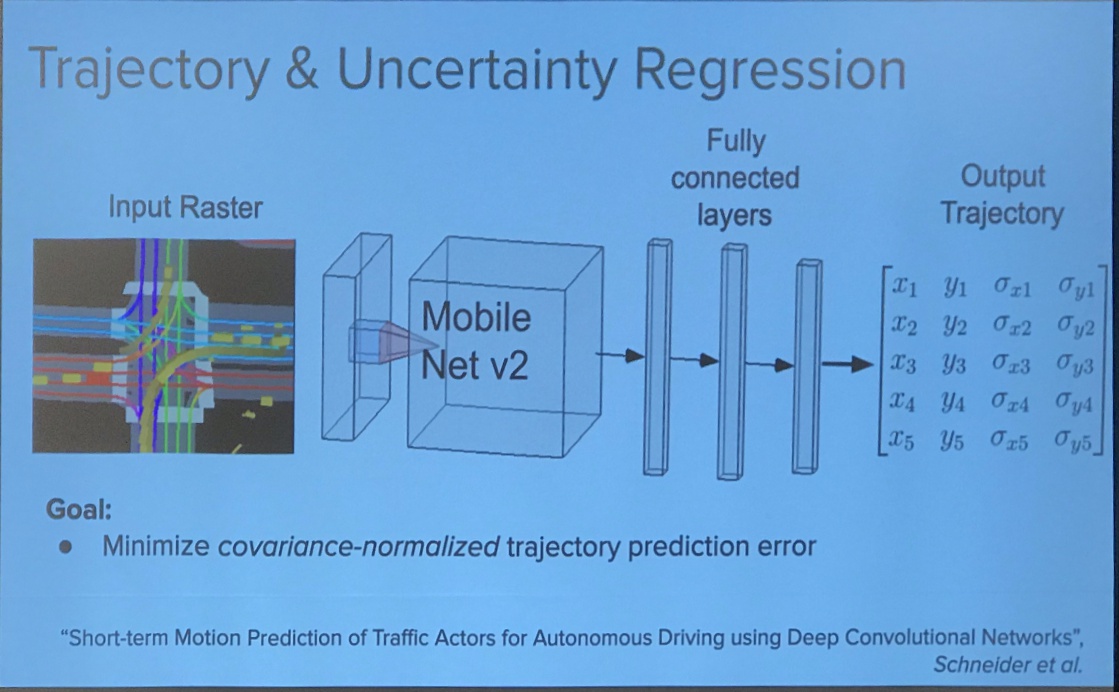
Sammy Omari@prediction
- Trajectory prediction
- Lane-graph-based rollout for trajectory hypothesis
- Trajectory scoring (which trajectory is how likely)
- Regress uncertainty and incorporate in loss (Short-term Motion Prediction of Traffic Actors for Autonomous Driving using Deep Convolutional Networks)
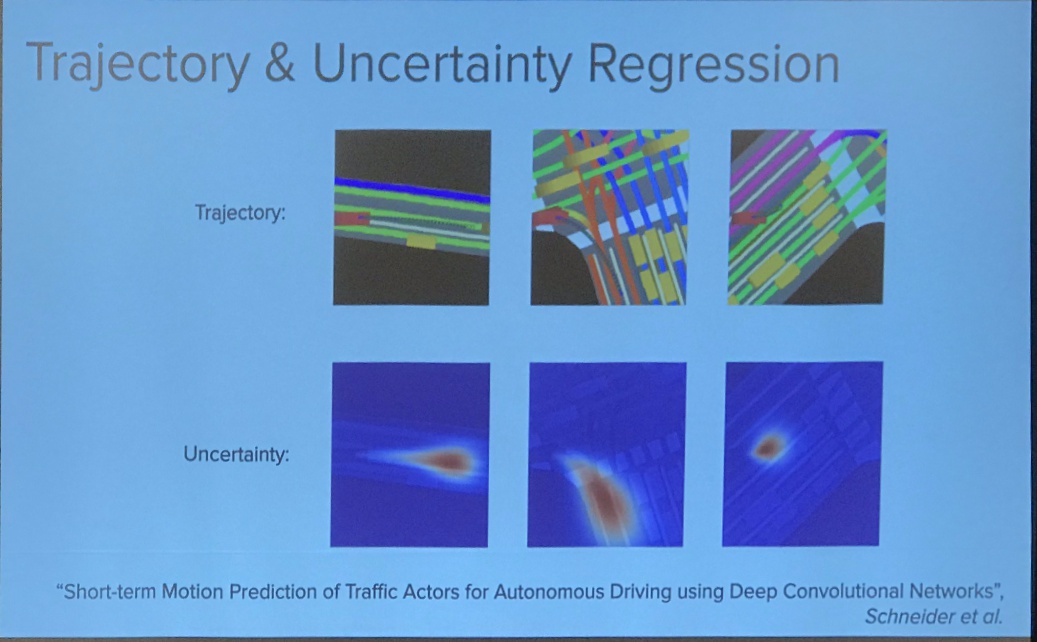
- Is top down raster sufficient for prediction? (IntentNet, ChaufeurNet)
- Not for humans, pedestrian crossing or people on bikes. (A data-driven approach for pedestrian intention estimation)
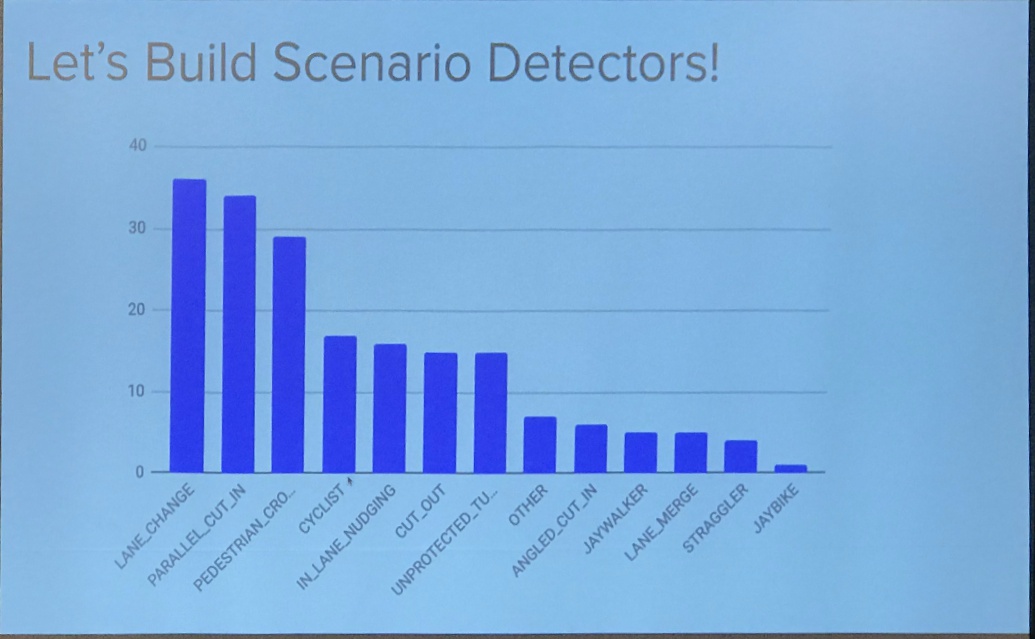
- Again, Data imbalance
- Lange changes vs others
- Intersection vs road
- turning vs straight
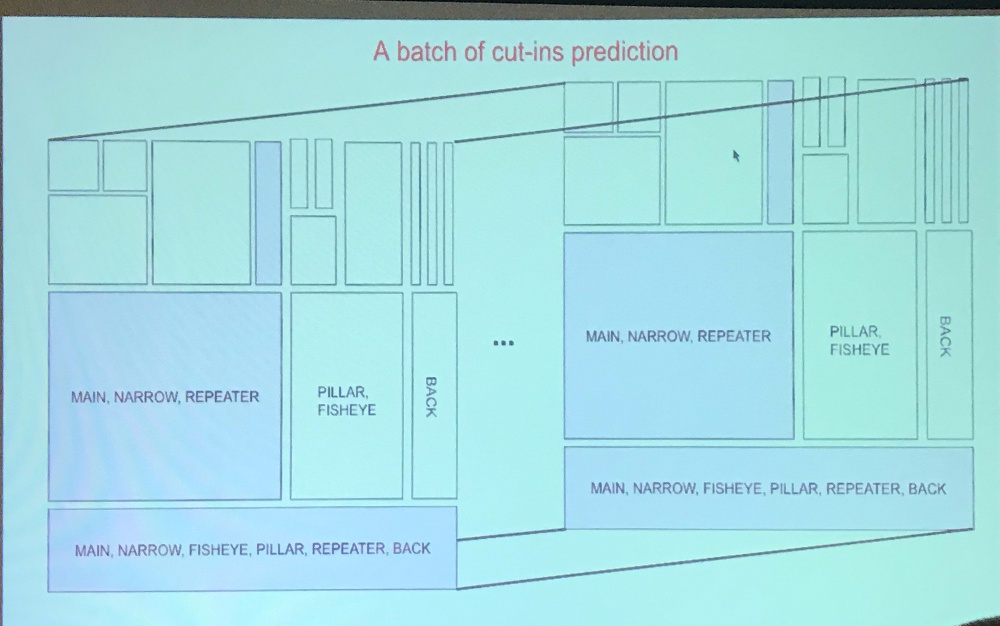
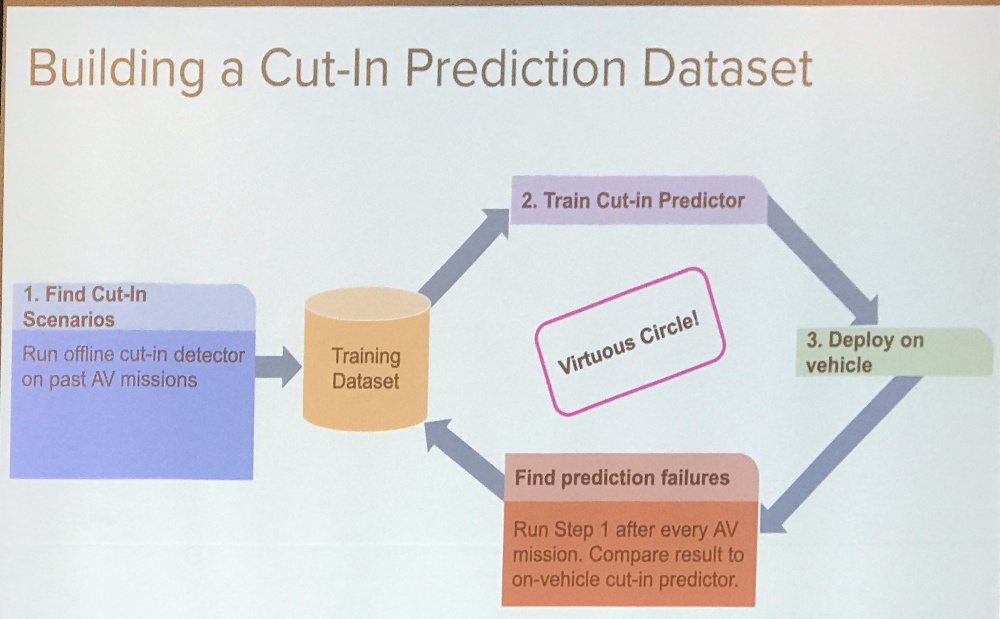
- Build cut-in predictor dataset
- Highly imbalanced data (most vehicles just follow lanes and follow rules)
- Q: How to detect online the uncertainty and quality of the dl or expert system, and then leave to expert systems
Peter Ondruska@director of eng
- Long tail of events: easy case quite often
Uncertainty in DL
trajectory forecasting
- Kris Kitani@CMU
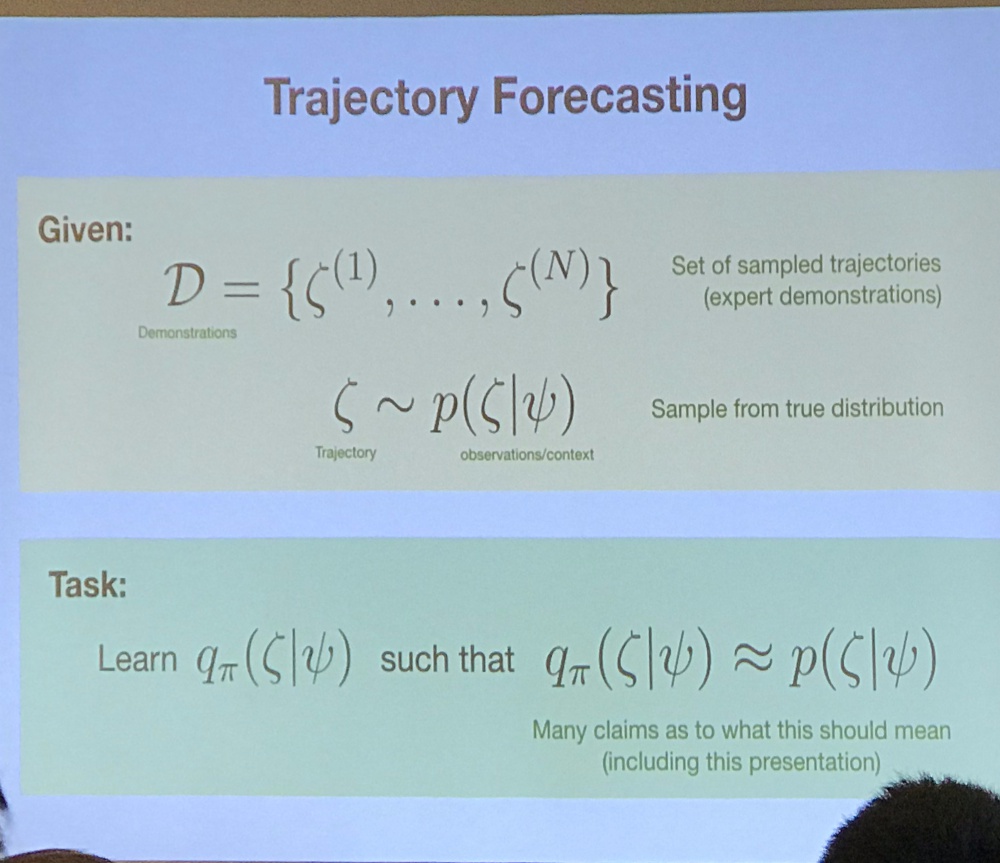
- How to recover multi-model from unimodal observation? “I want to know everyting the traffic agent may do” for safety critical systems
- Input: egocentric video
- Output: current pose, third person GT, future pose forecasting
- Very underdetermined
- Immitation learning (behavior cloning) is different from reinforcmenet leanring
- Behavior cloning: min cross entropy
- forward x-entropy prioritize recall
- reverse x-entropy prioritize precision
- Symmetric cross entropy
- How to identify extremely rare cases? We want to sample trajectories that are diverse and likely.
Alex Kendall
- Epistemic uncertainty: use MC dropout or ensemble
- Aleatoric uncertainty remain constant while epistemic uncertainty increases for out of data example
- Note: Improve epistemic uncertainty is higher priority, can be done offline
- Critical problem: convert the long tail distribution to a uniform distribution